































عبدالرحمن رجب a علیرضا عبداللہی b ، کریم رجب c ، ہورسٹ ٹریبلمیئر d,
- a شعبہ مینجمنٹ اینڈ لاء، فیکلٹی آف اکنامکس، یونیورسٹی آف روم ٹور ورگاٹا، کولمبیا کے ذریعے، 2، روم 00133، اٹلی
- b شعبہ بزنس ایڈمنسٹریشن، فیکلٹی آف مینجمنٹ، خرزمی یونیورسٹی، 1599964511 تہران، ایران
- c فیکلٹی آف سائنسز آف بیزرٹ، یونیورسٹی آف کارتھیج، زرزونا، 7021 بیزرٹ، تیونس
- d اسکول آف انٹرنیشنل مینجمنٹ، موڈول یونیورسٹی ویانا، ایم کاہلنبرگ 1، 1190 ویانا، آسٹریا
| آرٹیکل کی معلومات | خلاصہ |
| مطلوبہ الفاظ: ڈرون UAV صحت سے متعلق زراعت چیزوں کے انٹرنیٹ Bibliometrics | ڈرون، جنہیں بغیر پائلٹ کے فضائی گاڑیاں (UAV) بھی کہا جاتا ہے، نے حالیہ دہائیوں میں ایک قابل ذکر ترقی دیکھی ہے۔ زراعت میں، انہوں نے کسانوں کو لاگت میں خاطر خواہ بچت کی پیشکش کرکے کاشتکاری کے طریقوں کو تبدیل کیا ہے، اضافہ ہوا ہے۔ آپریشنل کارکردگی، اور بہتر منافع. پچھلی دہائیوں میں، زرعی ڈرون کا موضوع رہا ہے۔ قابل ذکر تعلیمی توجہ اپنی طرف متوجہ کیا. اس لیے ہم کتابیات کی بنیاد پر ایک جامع جائزہ لیتے ہیں۔ موجودہ علمی لٹریچر کا خلاصہ اور ساخت اور موجودہ تحقیقی رجحانات اور ہاٹ سپاٹ کو ظاہر کرنے کے لیے۔ ہم bibliometric تکنیکوں کو لاگو کریں اور زرعی ڈرون کے ارد گرد ادب کا تجزیہ کریں اور خلاصہ کریں پچھلی تحقیق کا جائزہ لیں۔ ہمارا تجزیہ بتاتا ہے کہ ریموٹ سینسنگ، درستگی زراعت، گہری تعلیم، مشین لرننگ، اور انٹرنیٹ آف تھنگز زرعی ڈرونز سے متعلق اہم موضوعات ہیں۔ شریک اقتباس تجزیہ ادب میں چھ وسیع تحقیقی کلسٹرز کو ظاہر کرتا ہے۔ یہ مطالعہ زراعت میں ڈرون تحقیق کا خلاصہ کرنے اور مستقبل کی تحقیقی سمتوں کی تجویز کرنے کی پہلی کوششوں میں سے ایک ہے۔ |
تعارف
زراعت دنیا کے بنیادی غذائی ذرائع کی نمائندگی کرتی ہے (Friha et al., 2021)، اور اسے شدید چیلنجز کا سامنا ہے
کھانے کی مصنوعات کی بڑھتی ہوئی طلب، خوراک کی حفاظت، اور حفاظتی خدشات کے ساتھ ساتھ ماحولیاتی تحفظ، پانی کے تحفظ، اور
پائیداری (Inoue، 2020)۔ یہ ترقی جاری رہنے کی پیش گوئی کی گئی ہے کیونکہ 9.7 تک دنیا کی آبادی 2050 بلین تک پہنچنے کا تخمینہ ہے۔
(2019)۔ چونکہ زراعت عالمی سطح پر پانی کے استعمال کی سب سے نمایاں مثال ہے، اس لیے توقع کی جاتی ہے کہ خوراک کی طلب اور پانی
مستقبل قریب میں کھپت ڈرامائی طور پر بڑھے گی۔ مزید برآں، کھادوں اور کیڑے مار ادویات کی بڑھتی ہوئی کھپت
کھیتی باڑی کی سرگرمیوں کی شدت کے ساتھ مستقبل میں ماحولیاتی چیلنجوں کا باعث بن سکتا ہے۔ اسی طرح، قابل کاشت زمین محدود ہے، اور
دنیا بھر میں کسانوں کی تعداد کم ہو رہی ہے۔ یہ چیلنجز جدید اور پائیدار کاشتکاری کے حل کی ضرورت پر زور دیتے ہیں (ایلیاہ
وغیرہ، 2018؛ فریحہ وغیرہ، 2021؛ Inoue، 2020؛ Tzounis et al.، 2017)۔
ان چیلنجوں سے نمٹنے کے لیے نئی ٹیکنالوجیز کو شامل کرنا ایک امید افزا حل کے طور پر شناخت کیا گیا ہے۔ سمارٹ فارمنگ (Brewster et al.،
2017; Tang et al., 2021) اور درست زراعت (Feng et al., 2019; Khanna & Kaur, 2019) اس طرح کے مباحثوں کے نتیجے میں ابھرے ہیں۔ دی
سابقہ کارکردگی اور افادیت کو بڑھانے کے لیے کاشتکاری کی سرگرمیوں میں انفارمیشن کمیونیکیشن ٹیکنالوجیز (ICT) اور دیگر جدید اختراعات کو اپنانے کا ایک عمومی تصور ہے (Haque et al.، 2021)۔ مؤخر الذکر سائٹ کے مخصوص انتظام پر توجہ مرکوز کرتا ہے جس میں زمین کو تقسیم کیا گیا ہے۔
یکساں حصے، اور ہر حصے کو نئی ٹیکنالوجیز کے ذریعے فصل کی پیداوار کو بہتر بنانے کے لیے زرعی ان پٹ کی صحیح مقدار ملتی ہے (Feng et al., 2019; Khanna & Kaur, 2019)۔ نمایاں ٹیکنالوجیز جنہوں نے اس میدان میں اسکالرز کی توجہ مبذول کروائی ہے ان میں وائرلیس سینسر نیٹ ورکس (WSNs) (J. Zheng & Yang, 2018; Y. Zhou et al., 2016), The Internet of Things (IoT) (Gill et al., 2017؛ وہ وغیرہ، 2021؛ لیو وغیرہ، 2019)
مصنوعی ذہانت (AI) تکنیک، بشمول مشین لرننگ اور ڈیپ لرننگ (Liakos et al., 2018; Parsaeian et al., 2020; Shadrin et al.,
2019)، کمپیوٹنگ ٹیکنالوجیز (Hsu et al., 2020; Jinbo et al., 2019; Zamora-Izquierdo et al., 2019), بگ ڈیٹا (Gill et al., 2017; Tantalaki
et al.، 2019)، اور blockchain (PW Khan et al.، 2020؛ Pincheira et al.، 2021)۔
مذکورہ بالا ٹیکنالوجیز کے علاوہ، ریموٹ سینسنگ کو ایک تکنیکی ٹول سمجھا جاتا ہے جس میں بہتری کی اعلیٰ صلاحیت ہے۔
ہوشیار اور صحت سے متعلق زراعت. مصنوعی سیارہ، انسانی عملے کے طیارے، اور ڈرون مقبول ریموٹ سینسنگ ٹیکنالوجیز ہیں (Tsouros et al.، 2019)۔
ڈرونز، جو کہ بغیر پائلٹ کے فضائی گاڑیاں (UAVs)، بغیر پائلٹ کے ہوائی جہاز کے نظام (UAS) کے نام سے مشہور ہیں، اور دور دراز سے پائلٹ والے ہوائی جہاز، ان میں سے ہیں۔
بہت اہمیت ہے کیونکہ ان کے دیگر ریموٹ سینسنگ ٹیکنالوجیز کے مقابلے میں متعدد فوائد ہیں۔ مثال کے طور پر، ڈرون فراہم کر سکتے ہیں
ابر آلود دنوں میں اعلیٰ معیار اور اعلیٰ ریزولوشن والی تصاویر (Manfreda et al.، 2018)۔ اس کے علاوہ، ان کی دستیابی اور منتقلی کی رفتار دوسرے کی تشکیل کرتی ہے۔
فوائد (Radoglou-Grammatikis et al.، 2020)۔ ہوائی جہاز کے مقابلے میں، ڈرون انتہائی سستے اور ترتیب دینے اور برقرار رکھنے میں آسان ہیں (Tsouros et al.، 2019)۔ ابتدائی طور پر بنیادی طور پر فوجی مقاصد کے لیے استعمال کیے جانے کے باوجود، ڈرونز متعدد سویلین ایپلی کیشنز کو فائدہ پہنچا سکتے ہیں، مثال کے طور پر سپلائی چین مینجمنٹ (A. Rejeb, Rejeb, et al., 2021a)، انسانی مقاصد کے لیے (A. Rejeb, Rejeb, et al., 2021c)، سمارٹ ایگریکلچر، سروےنگ اور میپنگ، ثقافتی ورثے کی دستاویزات، ڈیزاسٹر مینجمنٹ، اور جنگلات اور جنگلی حیات کا تحفظ (پاندے، پراتیہسٹ، وغیرہ، 2020)۔ زراعت میں، ڈرونز کے کئی گنا استعمال کے علاقے موجود ہیں کیونکہ انہیں فصل کے انتظام میں مدد کے لیے نئی ٹیکنالوجیز، کمپیوٹنگ کی صلاحیتوں، اور آن بورڈ سینسرز کے ساتھ مربوط کیا جا سکتا ہے (مثلاً نقشہ سازی، نگرانی، آبپاشی، پودوں کی تشخیص) (H. Huang et al.، 2021) , ڈیزاسٹر ریڈکشن، ابتدائی انتباہی نظام، جنگلی حیات اور جنگلات کے تحفظ کے لیے چند ایک کے نام (نیگاش ایٹ ال۔، 2019)۔ اسی طرح، ڈرون کا استعمال کئی زرعی سرگرمیوں میں کیا جا سکتا ہے، بشمول فصل اور نمو کی نگرانی، پیداوار کا تخمینہ، پانی کے تناؤ کا اندازہ، اور ماتمی لباس، کیڑوں اور بیماریوں کا پتہ لگانا (Inoue, 2020; Panday, Pratihast, et al., 2020)۔ ڈرون کو نہ صرف ان کے حسی اعداد و شمار کی بنیاد پر نگرانی، تخمینہ لگانے اور پتہ لگانے کے مقاصد کے لیے استعمال کیا جا سکتا ہے بلکہ درست آبپاشی اور گھاس، کیڑوں اور بیماریوں کے انتظام کے لیے بھی استعمال کیا جا سکتا ہے۔ دوسرے الفاظ میں، ڈرون ماحولیاتی اعداد و شمار کی بنیاد پر صحیح مقدار میں پانی اور کیڑے مار ادویات کا چھڑکاؤ کرنے کے قابل ہیں۔ زراعت میں ڈرون کے فوائد کا خلاصہ جدول 1 میں دیا گیا ہے۔
زراعت میں ڈرون کے اہم فوائد۔
| فائدہ | حوالہ جات) |
| وقتی اور مقامی کو بہتر بنائیں قراردادوں کو محسوس کرنا | (Gago et al., 2015; Niu et al., 2020; Srivastava اور ایل، 2020) |
| صحت سے متعلق زراعت کی سہولت فراہم کریں۔ | (L. Deng et al., 2018; Kalischuk et al., 2019; Maimaitijiang et al.، 2017) |
| کی درجہ بندی اور اسکاؤٹنگ فصلیں | (Inoue, 2020; Kalischuk et al., 2019; Lopez- ´ Granados et al., 2016; Maimaitijiang et al., 2017; میلویل وغیرہ، 2019؛ موہرانا اور دتہ، 2016) |
| کھاد کا استعمال | (L. Deng et al., 2018; Guan et al., 2019) |
| خشک سالی کی نگرانی | (Fawcett et al., 2020; Panday, Pratihast, et al., 2020; Su et al., 2018) |
| بائیو ماس کا تخمینہ | (Bendig et al.، 2014) |
| پیداوار کا تخمینہ | (Inoue, 2020; Panday, Shrestha, et al., 2020; Tao اور ایل، 2020) |
| آفات میں کمی | (نیگاش وغیرہ، 2019) |
| جنگلی حیات کا تحفظ اور جنگلات | (نیگاش وغیرہ، 2019؛ پانڈے، پرتیہست، وغیرہ، 2020) |
| پانی کے دباؤ کا اندازہ | (Inoue, 2020; J. Su, Coombes, et al., 2018; L. Zhang et al., 2019) |
| کیڑے، ماتمی لباس اور بیماری کا پتہ لگانے | (Gaˇsparovic'c et al., 2020; Inoue, 2020; J. Su, Liu, وغیرہ، 2018؛ X. Zhang et al., 2019) |
دوسری طرف، ڈرون کو بھی حدود کا سامنا ہے۔ پائلٹ کی شمولیت، انجن کی طاقت، استحکام اور وشوسنییتا، پے لوڈ کی وجہ سے سینسر کا معیار
وزن کی حدود، عمل درآمد کے اخراجات، اور ہوا بازی کے ضابطے، ان میں شامل ہیں (C. Zhang & Kovacs، 2012)۔ ہم خامیوں کا موازنہ کرتے ہیں۔
ٹیبل 2 میں تین موبائل ریموٹ سینسنگ ٹیکنالوجیز۔ دیگر ریموٹ سینسنگ ٹیکنالوجیز، جیسے مٹی کے سینسر، اس مطالعہ کی توجہ سے باہر ہیں۔
مختلف موبائل ریموٹ سینسنگ ٹیکنالوجیز کی خامیاں۔
| دور دراز سینسنگ ٹیکنالوجی | مختصریاں | حوالہ جات |
| ڈرون (UAV) | پائلٹ کی شمولیت؛ تصاویر معیار (اوسط)؛ نفاذ کے اخراجات (اوسط)؛ استحکام، تدبیر، اور اعتبار؛ معیاری کاری انجن کی طاقت؛ محدود طاقت ذرائع (بیٹری لمبی عمر)؛ محدود پرواز کی مدت، تصادم اور سائبر حملے؛ محدود پے لوڈ وزن؛ بڑے ڈیٹا سیٹس اور محدود ڈیٹا پروسیسنگ صلاحیتیں ضابطے کی کمی؛ مہارت کی کمی، اعلی داخلہ تک رسائی میں رکاوٹیں زرعی ڈرونز؛ | (Bacco et al.، 2018؛ Dawaliby وغیرہ، 2020؛ ہارڈین اور ہارڈین، 2010؛ ہارڈین اور جینسن، 2011؛ لگکاس وغیرہ، 2018; Laliberte et al.، 2007; لالیبرٹ اور رنگو، 2011؛ Manfreda et al., 2018, 2018; Nebiker et al.، 2008؛ پوری وغیرہ، 2017؛ ویلسامی وغیرہ، 2022; C. Zhang & Kovacs, 2012) |
| سیٹلائٹ | متواتر سیٹلائٹ کوریج، محدود سپیکٹرل ریزولوشن؛ مرئیت کے مسائل کا خطرہ (مثال کے طور پر، بادل)؛ غیر دستیابی اور کم منتقلی کی رفتار؛ واقفیت اور vigneting مہنگے مقامی ڈیٹا کو متاثر کرتا ہے۔ مجموعہ؛ سست ڈیٹا کی ترسیل صارفین کو ختم کرنے کا وقت | (ابوطالبی وغیرہ، 2019؛ Cen وغیرہ، 2019؛ چن وغیرہ، 2019; نینسن اور ایلیٹ، 2016; پانڈے، پرتیہست، وغیرہ، 2020؛ سائی ونیت اور ایل، 2019) |
| ہوائی جہاز | اعلی گود لینے کے اخراجات؛ پیچیدہ سیٹ اپ؛ بحالی کے اخراجات؛ قابل اعتماد کی عدم دستیابی ہوائی جہاز، جیومیٹری تصاویر غیر باقاعدہ ڈیٹا حصول لچک کی کمی؛ مہلک حادثات؛ سینسر ڈیٹا کمپن کی وجہ سے تغیرات؛ جغرافیائی حوالے سے متعلق مسائل | (آرمسٹرانگ وغیرہ، 2011؛ Atkinson et al., 2018; باربیڈو اور کوئینیگکان، 2018؛ Kovalev اور Voroshilova، 2020; Suomalainen et al. 2013; Thamm et al.، 2013) |
زراعت میں ایک کثیر الشعبہ اور کثیر مقصدی ٹیکنالوجی کے طور پر، ڈرونز کی مختلف زاویوں سے تحقیق کی گئی ہے۔ مثال کے طور پر، اسکالرز نے زراعت میں ڈرون ایپلی کیشنز کی جانچ کی ہے (Kulbacki et al., 2018; Mogili & Deepak, 2018), ان کی صحت سے متعلق زراعت میں شراکت (Puri et al., 2017; Tsouros et al., 2019)، ان کی دیگر کے ساتھ تکمیل جدید ٹیکنالوجیز (Al-Thani et al., 2020; Dutta & Mitra, 2021; Nayyar et al., 2020; Saha et al., 2018)، اور ان کی نیویگیشنل اور سینسنگ صلاحیتوں کو آگے بڑھانے کے امکانات (Bareth et al. ، 2015؛ Suomalainen et al.، 2014)۔ چونکہ زراعت میں ڈرون ایپلی کیشنز پر تحقیق عام ہوچکی ہے (خان وغیرہ، 2021))، موجودہ لٹریچر کا خلاصہ کرنے اور ڈومین کی فکری ساخت کو ظاہر کرنے کی ضرورت ہے۔ مزید برآں، مسلسل بہتری کے ساتھ ایک ہائی ٹیک فیلڈ کے طور پر، وقتاً فوقتاً موجودہ لٹریچر کا خلاصہ کرنے اور اہم تحقیقی خلاء کی نشاندہی کرنے کے لیے منظم جائزے کیے جانے کی ضرورت ہے۔ کو
تاریخ، کچھ جائزے ہیں جو زرعی شعبے میں ڈرون ایپلی کیشنز پر بحث کرتے ہیں۔ مثال کے طور پر، موگیلی اور دیپک (2018) نے فصل کی نگرانی اور کیڑے مار دوا کے چھڑکاؤ کے لیے ڈرونز کے مضمرات کا مختصر جائزہ لیا۔ Inoue (2020) زراعت میں ریموٹ سینسنگ میں سیٹلائٹ اور ڈرون کے استعمال کا جائزہ لیتا ہے۔ مصنف سمارٹ فارمنگ کو اپنانے کے تکنیکی چیلنجوں اور کیس اسٹڈیز اور بہترین طریقوں کی بنیاد پر سیٹلائٹ اور ڈرون کے تعاون کی کھوج کرتا ہے۔ Tsouros et al. (2019) مختلف قسم کے ڈرونز اور زراعت میں ان کی اہم ایپلی کیشنز کا خلاصہ کریں، ڈیٹا کے حصول اور پروسیسنگ کے مختلف طریقوں کو اجاگر کریں۔ ابھی حال ہی میں، Aslan et al. (2022) نے زرعی سرگرمیوں میں UAV ایپلی کیشنز کا ایک جامع جائزہ لیا اور گرین ہاؤس میں UAV کے لیے بیک وقت لوکلائزیشن اور میپنگ کی مطابقت کو اجاگر کیا۔ Diaz-Gonzalez et al. (2022) مختلف مشین لرننگ تکنیک اور ریموٹ پر مبنی فصل کی پیداوار کے حالیہ مطالعات کا جائزہ لیا
سینسنگ سسٹمز ان کے نتائج نے اشارہ کیا کہ UAVs مٹی کے اشارے کا تخمینہ لگانے اور مقامی ریزولوشن، معلومات کی عارضی اور لچک کے لحاظ سے سیٹلائٹ سسٹم کو بہتر بنانے کے لیے مفید ہیں۔ بصیری وغیرہ۔ (2022) نے درست زراعت کے تناظر میں ملٹی روٹر UAVs کے لیے راستے کی منصوبہ بندی کے چیلنجوں پر قابو پانے کے لیے مختلف طریقوں اور طریقوں کا ایک جامع جائزہ لیا۔ مزید یہ کہ اویس وغیرہ۔ (2022) نے پانی کی کیفیت کا اندازہ لگانے کے لیے فصلوں میں UAV ریموٹ سینسنگ ڈیٹا کے اطلاق کا خلاصہ کیا اور ویسٹر اسٹریس ایپلی کیشن کے لیے UAV ریموٹ سینسنگ کی ممکنہ صلاحیت کی گہرائی سے ترکیب فراہم کی۔ آخر میں، Aquilani et al. (2022) نے چراگاہ پر مبنی لائیوسٹاک سسٹمز میں لاگو پیشگی فارمنگ ٹیکنالوجیز کا جائزہ لیا اور اندازہ لگایا کہ UAVs کے ذریعے فعال کردہ ریموٹ سینسنگ بائیو ماس کی تشخیص اور ریوڑ کے انتظام کے لیے فائدہ مند ہے۔
نیز، حال ہی میں مویشیوں کی نگرانی، ٹریکنگ اور جمع کرنے میں UAVs کے استعمال کی کوششوں کی اطلاع ملی ہے۔
اگرچہ ان جائزوں سے نئی اور اہم بصیرتیں ملتی ہیں، لیکن ببلیو میٹرکس پر مبنی کوئی جامع اور تازہ ترین جائزہ ادب میں نہیں مل سکتا، جو علمی فرق کو واضح کرتا ہو۔ مزید برآں، یہ کہا گیا ہے کہ جب علمی پیداوار ایک سائنسی ڈومین میں بڑھتی ہے، تو محققین کے لیے ڈومین کے علمی ڈھانچے کو سمجھنے کے لیے مقداری جائزے کے طریقوں کو استعمال کرنا بہت ضروری ہو جاتا ہے (Rivera & Pizam, 2015)۔ اسی طرح، فریرا وغیرہ۔ (2014) نے استدلال کیا کہ جیسے جیسے تحقیقی شعبے پختہ ہوتے جاتے ہیں اور پیچیدہ ہوتے جاتے ہیں، اسکالرز کو کبھی کبھار نئی شراکتوں کو ظاہر کرنے، تحقیقی روایات اور رجحانات کو حاصل کرنے، اس بات کی نشاندہی کرنے کے لیے کہ کون سے عنوانات کا مطالعہ کیا جاتا ہے، اور علمی ڈھانچے کا جائزہ لینے کے لیے پیدا ہونے والے اور اکٹھے کیے گئے علم کو سمجھنا چاہیے۔ فیلڈ اور ممکنہ تحقیقی ہدایات۔ جبکہ Raparelli اور Bajocco (2019) نے زراعت اور جنگلات میں ڈرون ایپلی کیشنز کے علم کے ڈومین کی جانچ کرنے کے لیے ایک bibliometric تجزیہ کیا، ان کا مطالعہ صرف 1995 اور 2017 کے درمیان شائع ہونے والی علمی تحقیق پر غور کرتا ہے، جو اس تیزی سے آگے بڑھنے والے علاقے کی حرکیات کی عکاسی نہیں کرتی ہے۔ مزید، مصنفین نے میدان میں سب سے زیادہ بااثر شراکتوں کی نشاندہی کرنے، ادب کو کلسٹر کرنے، اور اقتباسات کے تجزیہ کا استعمال کرتے ہوئے دانشورانہ ڈھانچے کا جائزہ لینے کی کوشش نہیں کی۔ نتیجے کے طور پر، موجودہ تحقیقی مرکز، رجحانات اور ہاٹ سپاٹ کو ظاہر کرنے کے لیے لٹریچر کا خلاصہ کرنا ضروری ہے۔
علم کے اس خلاء کو پُر کرنے کے لیے، ہم مقداری طریقہ کار اور سخت بائبلیومیٹرک طریقوں سے فائدہ اٹھاتے ہیں تاکہ ڈرون اور زراعت کے سنگم پر تحقیق کی موجودہ حالت کا جائزہ لیا جا سکے۔ ہم دلیل دیتے ہیں کہ موجودہ مطالعہ ایک ابھرتی ہوئی ٹیکنالوجی کا جائزہ لے کر موجودہ ادب میں کئی شراکتیں کرتا ہے جس کی زراعت میں بہت ضرورت ہے کیونکہ یہ اس شعبے میں کئی پہلوؤں کو تبدیل کرنے کی زبردست صلاحیت فراہم کرتی ہے۔ زراعت کے تناظر میں ڈرون کے بارے میں بکھرے ہوئے اور بکھرے ہوئے علم کو دیکھتے ہوئے زرعی ڈرون کے ببلیو میٹرک تجزیہ کی ضرورت اور بھی محسوس کی جاتی ہے۔ اسی طرح، زرعی ڈرون سے متعلق لٹریچر کو منظم طریقے سے کلسٹر کرنے کی ضرورت ہے، اس تحقیق کے میدان کی بنیاد بنانے والے انتہائی بااثر مطالعات کو مدنظر رکھتے ہوئے۔ تجزیہ میں قابلیت میں ادب میں پیش کیے گئے اہم تحقیقی موضوعات کی وضاحت بھی شامل ہے۔ ٹکنالوجی کی تبدیلی کی صلاحیت پر غور کرتے ہوئے، ہم سمجھتے ہیں کہ نیٹ ورک کا گہرا تجزیہ بااثر کاموں کا تعین کرکے اور ڈرونز کی زراعت کی صلاحیت سے متعلق موضوعات کو ظاہر کرکے نئی بصیرت پیدا کرتا ہے۔
لہذا ہم مندرجہ ذیل تحقیقی مقاصد کو حاصل کرنے کی کوشش کرتے ہیں:
- زراعت کے میدان میں ڈرون ایپلی کیشنز میں شاندار شراکت کے ساتھ بااثر اشاعتوں کی شناخت۔
- لٹریچر کا جھرمٹ، تحقیقی مرکز کی شناخت، اور معنوی مماثلت پر مبنی بنیادی 'دانشورانہ ڈھانچے' کے مطالعہ کی نقشہ سازی کے ساتھ حوالہ تجزیہ کا استعمال کرتے ہوئے۔
- میدان میں مختلف اشاعتوں کے درمیان وقت کے ساتھ روابط اور حوالہ جات کے نیٹ ورک کے ارتقاء کو سمجھنا اور مستقبل کی تحقیقی سمتوں اور گرم موضوعات کی شناخت۔
باقی کاغذ کی ساخت اس طرح ہے: سیکشن 2 طریقہ کار اور ڈیٹا اکٹھا کرنے کے اقدامات کا خاکہ پیش کرتا ہے۔ سیکشن 3 تجزیوں کے نتائج فراہم کرتا ہے۔ اور سیکشن 4 نتائج پر بحث کرتا ہے اور تحقیقی تعاون، مضمرات، اور مستقبل کی سمتوں کے ساتھ نتیجہ اخذ کرتا ہے۔
طریقہ کار
اس موجودہ تحقیقی مطالعہ میں، ہم زراعت میں ڈرون ایپلی کیشنز کو دریافت کرنے کے لیے ایک بائبلی میٹرک تجزیہ کرتے ہیں۔ یہ مقداری نقطہ نظر نالج ڈومین (اروڑا اور چکرورتی، 2021) کے فکری ڈھانچے اور موجودہ حیثیت، گرم موضوعات، اور مستقبل کی تحقیقی سمتوں کو ظاہر کرتا ہے جن کی اس طریقہ کار کو لاگو کرکے تحقیق کی جاسکتی ہے (کپور وغیرہ، 2018؛ مشرا وغیرہ۔ , 2017; A. Rejeb, Rejeb, et al., 2021b; A. Rejeb et al., 2021d; MA Rejeb et al., 2020)۔ عام طور پر، ایک بائبلومیٹرک تجزیہ موجودہ لٹریچر کی جانچ پڑتال کرتا ہے تاکہ تحریری مواصلات کے چھپے ہوئے نمونوں اور اعداد و شمار اور ریاضی کے طریقوں پر مبنی نظم و ضبط کے ارتقاء کا خلاصہ کیا جا سکے، اور یہ بڑے ڈیٹا سیٹس پر لاگو ہوتا ہے (پرچرڈ، 1969؛ سمال، 1999؛ طہائی اور رگسبی ، 1998)۔ bibliometrics کا استعمال کرتے ہوئے، ہم موجودہ نمونوں اور تحقیقی فوکس کو بہتر طور پر سمجھنے کی خواہش رکھتے ہیں جو مماثلت کی بنیاد پر ڈومین میں حصہ ڈالتے ہیں (Thelwall, 2008)۔ Bibliometrics طریقہ کار کی معروضی مقداری طاقت (Casillas & Acedo, 2007) کی مدد سے نئی بصیرتیں فراہم کرتی ہے۔ متعدد اسکالرز اس سے قبل متعلقہ ڈومینز میں ببلیو میٹرک اسٹڈیز کر چکے ہیں، بشمول زراعت، ریموٹ سینسنگ، اور ڈیجیٹل ٹرانسفارمیشن (Armenta-Medina et al. & Queiroz، 2020؛ Wang et al.، 2019)۔
حوالہ تجزیہ
حوالہ جات کا تجزیہ کسی تحقیقی میدان میں مختلف بصیرت کو ظاہر کرتا ہے۔ سب سے پہلے، یہ سب سے زیادہ بااثر مصنفین اور اشاعتوں کو ظاہر کرنے میں مدد کرتا ہے جو کسی تحقیقی میدان میں حصہ ڈالتے ہیں اور ایک اہم اثر ڈالتے ہیں (گنڈوف اینڈ فلسر، 2013)۔ دوم، علم کے بہاؤ اور مصنفین کے درمیان رابطے کے روابط کو بے نقاب کیا جا سکتا ہے۔ آخر میں، حوالہ اور حوالہ دینے والے کاموں کے درمیان روابط کا سراغ لگا کر، کوئی بھی وقت کے ساتھ ساتھ علمی ڈومین کی تبدیلیوں اور ارتقاء کو تلاش کر سکتا ہے (پورناڈر
وغیرہ، 2020)۔ کسی اشاعت کے اعلیٰ اقتباسات اس کی مطابقت اور تحقیقی ڈومین میں خاطر خواہ شراکت کی عکاسی کرتے ہیں (بالڈی، 1998؛ گنڈولف اور فلسر، 2013؛ مارینکو، 1998)۔ اشاعتوں کے حوالہ جات کا تجزیہ متعلقہ کاموں کی شناخت کرنے اور وقت کے ساتھ ساتھ ان کی مقبولیت اور پیشرفت کو ٹریک کرنے میں بھی مدد کرتا ہے۔
دستاویز کے تعاون کا تجزیہ
اقتباسات کا تجزیہ اشاعتوں کے درمیان تعلقات کو دریافت کرنے اور کسی فیلڈ کی فکری ساخت کو ظاہر کرنے کا ایک قابل قدر طریقہ ہے (Nerur et al.، 2008)۔ دوسرے الفاظ میں، سب سے زیادہ حوالہ شدہ اشاعتوں اور ان کے رابطوں کی نشاندہی کرکے، طریقہ اشاعتوں کو الگ الگ تحقیقی کلسٹروں میں گروپ کرتا ہے جہاں ایک کلسٹر میں اشاعتیں باقاعدگی سے ایک جیسے خیالات کا اشتراک کرتی ہیں (میک کین، 1990؛ سمال، 1973)۔ یہ بتانا ضروری ہے کہ مماثلت کا مطلب یہ نہیں ہے کہ اشاعتوں کے نتائج ہیں۔
ہم آہنگ اور ایک دوسرے سے متفق؛ موضوعات کی مماثلت کی وجہ سے اشاعتیں ایک ہی کلسٹر سے تعلق رکھتی ہیں، لیکن ان میں متضاد نقطہ نظر ہو سکتا ہے۔
ڈیٹا جمع اور تجزیہ
وائٹ اینڈ گریفتھ (1981) کے تجویز کردہ طریقہ کار پر عمل کرتے ہوئے، ہم نے مندرجہ ذیل پانچ مراحل پر عمل کرتے ہوئے، زراعت میں ڈرون ایپلی کیشنز کے پورے تحقیقی ڈومین کا احاطہ کرنے کے لیے جرنل کے مضامین کی ایک جامع تلاش کی:
- پہلا مرحلہ ڈیٹا اکٹھا کرنا تھا۔ اسکوپس کو معیاری نتائج کے ساتھ سب سے زیادہ جامع اور قابل اعتماد ڈیٹا بیس کے طور پر منتخب کیا گیا تھا۔ زراعت میں تمام ڈرون ایپلی کیشنز سے متعلق اشاعتوں کا میٹا ڈیٹا بازیافت کیا گیا۔ پھر ہم نے منتخب مضامین کا تجزیہ کیا، تجزیہ سے غیر موضوع مضامین کو ہٹا دیا۔
- ہم نے لٹریچر کا تجزیہ کیا اور تحقیقی علاقے میں استعمال ہونے والے اہم ترین مطلوبہ الفاظ کی نشاندہی کی۔
- اقتباس کے تجزیہ کا استعمال کرتے ہوئے، ہم نے مصنفین اور دستاویزات کے درمیان تعلق کو تلاش کیا تاکہ حوالہ جات کے بنیادی نمونوں کو ظاہر کیا جا سکے۔ ہم نے زرعی ڈرون کے میدان میں نمایاں شراکت کے ساتھ سب سے زیادہ بااثر مصنفین اور اشاعتوں کی بھی نشاندہی کی۔
- ہم نے اسی طرح کی اشاعتوں کو کلسٹرز میں گروپ کرنے کے لیے ایک مشترکہ حوالہ تجزیہ کیا۔
- آخر میں، ہم نے تعاون کے نیٹ ورک کو ظاہر کرنے کے لیے ممالک، اداروں اور جرائد کے درمیان روابط اور روابط کا تجزیہ کیا۔
مناسب تلاش کی اصطلاحات کی شناخت
ہم نے ڈیٹا اکٹھا کرنے کے لیے درج ذیل سرچ سٹرنگز کا اطلاق کیا: (ڈرون* یا "بغیر پائلٹ ہوائی گاڑی" یا uav* یا "بغیر پائلٹ ہوائی جہاز کا نظام"یا us یا "دور سے پائلٹ ہوائی جہاز”) اور (زرعی یا زراعت یا کاشتکاری یا کسان)۔ یہ تلاش ستمبر 2021 میں کی گئی تھی۔ ڈرونز کے کئی عہدے ہیں، جن میں UAV، UAS، اور دور سے چلنے والے طیارے (Sah et al., 2021) شامل ہیں۔ زراعت سے متعلق مخصوص تلاش کی اصطلاحات عبداللہی وغیرہ کے مطالعہ کی بنیاد پر شناخت کی گئیں۔ (2021)۔ وضاحت اور شفافیت کی خاطر، ہم نے جو درست استفسار استعمال کیا ہے وہ ضمیمہ 1 میں دیا گیا ہے۔ ڈیٹا صاف کرنے کے عمل کے بعد، ہم نے ایک ٹیکسٹ فائل بنائی جسے بعد میں BibExcel میں لوڈ کیا گیا، جو حوالہ اور حوالہ جات کے تجزیہ کے لیے ایک عام ٹول ہے۔ یہ ٹول دوسرے سافٹ وئیر کے ساتھ سادہ تعامل بھی پیش کرتا ہے اور ڈیٹا ہینڈلنگ اور تجزیہ میں کافی حد تک آزادی فراہم کرتا ہے۔ VOSviewer ورژن 1.6.16 کا استعمال نتائج کو دیکھنے اور bibliometric نیٹ ورکس بنانے کے لیے کیا گیا تھا (Eck & Waltman, 2009)۔ VOSviewer بہت سے بدیہی تصورات پیش کرتا ہے، خاص طور پر bibliometric نقشوں کا تجزیہ کرنے کے لیے (Geng et al., 2020)۔ مزید برآں، یہ سادہ بصری نتائج فراہم کرنے میں مدد کرتا ہے جو نتائج کو بہتر طور پر سمجھنے میں مدد کرتا ہے (Abdullahi et al.، 2021)۔ جیسا کہ اوپر بیان کیا گیا ہے تلاش کے تاروں کو لاگو کرتے ہوئے، ہم نے تمام متعلقہ اشاعتیں اکٹھی کیں اور محفوظ کر لیں۔ پہلے تلاش کے نتائج نے کل 5,085 دستاویزات حاصل کیں۔ منتخب نمونے کے معیار کو یقینی بنانے کے لیے، تحقیق میں صرف ہم مرتبہ نظرثانی شدہ جریدے کے مضامین پر غور کیا گیا، جس کے نتیجے میں دستاویز کی دیگر اقسام، جیسے کتابیں، ابواب، کانفرنس کی کارروائی، اور ادارتی نوٹ کو خارج کر دیا گیا۔ اسکریننگ کے عمل کے دوران، غیر متعلقہ (یعنی، اس کام کے دائرہ کار سے باہر)، بے کار (یعنی، ڈبل انڈیکسنگ سے پیدا ہونے والی نقلیں)، اور غیر انگریزی بولنے والی اشاعتوں کو فلٹر کر دیا گیا۔ اس عمل کے نتیجے میں 4,700 دستاویزات کو حتمی تجزیہ میں شامل کیا گیا۔
نتائج اور بحث
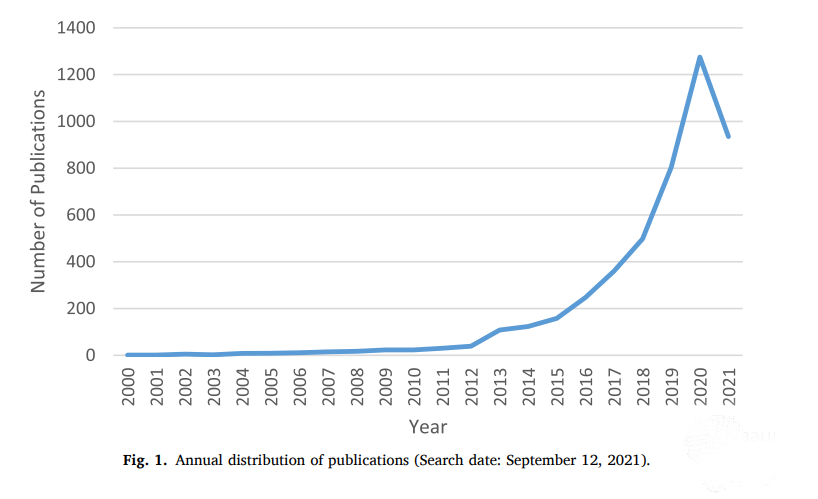
شروع کرنے کے لیے، ہم نے زرعی ڈرون پر موجودہ لٹریچر میں اشاعت کی پیداوار میں ہونے والی پیش رفت کا تجزیہ کیا۔ علمی تحقیق کی وقتی تقسیم تصویر 1 میں دکھائی گئی ہے۔ ہم 2011 (30 اشاعتوں) کے بعد اشاعتوں میں تیزی سے اضافہ دیکھتے ہیں۔ لہذا، ہم نے تجزیہ کی مدت کو دو مختلف مراحل میں تقسیم کرنے کا فیصلہ کیا۔ ہم 1990 اور 2010 کے درمیانی عرصے کو تعمیراتی مرحلے کے طور پر حوالہ دیتے ہیں، جس میں سالانہ تقریباً سات مقالے شائع ہوتے تھے۔ 2010 کے بعد کے دور کو ترقی کا مرحلہ کہا جاتا ہے کیونکہ اس عرصے کے دوران زراعت میں ڈرون ایپلی کیشنز پر تحقیق میں تیزی سے اضافہ دیکھنے میں آیا۔ 2010 کے بعد، اشاعتوں کی بڑھتی ہوئی تعداد محققین کے درمیان بڑھتی ہوئی دلچسپی کی تصدیق کرتی ہے، جو اس بات کی بھی عکاسی کرتی ہے کہ ڈرونز کو ریموٹ سینسنگ پر لاگو کیا گیا ہے اور درست زراعت میں استعمال کیا گیا ہے (Deng et al., 2018; Maes & Steppe, 2019; Messina & Modica, 2020) )۔ خاص طور پر، اشاعتوں کی تعداد 108 میں 2013 سے بڑھ کر 498 میں 2018 ہو گئی اور 1,275 میں 2020 تک پہنچ گئی۔ جنوری اور وسط ستمبر 935 کے درمیان کل 2021 مضامین شائع ہوئے۔ چونکہ یہ مدت زرعی ڈرون کی تازہ ترین اور اہم باریکیوں کی عکاسی کرتی ہے۔
مطلوبہ الفاظ کا تجزیہ
مصنفین اشاعت کے لیے جو مطلوبہ الفاظ منتخب کرتے ہیں اس کا اس بات پر اہم اثر پڑتا ہے کہ کاغذ کی نمائندگی کیسے کی جاتی ہے اور سائنسی برادریوں میں اس کا ابلاغ کیسے کیا جاتا ہے۔ وہ تحقیق کے اہم مضامین کی نشاندہی کرتے ہیں اور اس کے پنپنے یا ناکام ہونے کی صلاحیت کا تعین کرتے ہیں (Day & Gastel, 1998. Kim et al., 2016; Uddin et al., 2015)۔ کلیدی الفاظ کا تجزیہ، وسیع تر تحقیقی رجحانات اور سمتوں کو ظاہر کرنے کا ایک ٹول، ایک ڈومین (Dixit & Jakhar، 2021) میں تمام متعلقہ اشاعتوں کے کلیدی الفاظ کی تالیف سے مراد ہے۔ موجودہ مطالعہ میں، ہم نے سب سے زیادہ مقبول موضوعات کو دریافت کرنے کے لیے مجموعی مطلوبہ الفاظ کو دو سیٹوں (یعنی 2010 اور 2011–2021 تک) میں تقسیم کیا۔ ایسا کرنے سے، ہم دونوں سیٹوں میں اہم کلیدی الفاظ کو ٹریس کر سکتے ہیں اور یقین دلاتے ہیں کہ ہم نے تمام ضروری ڈیٹا حاصل کر لیا ہے۔ ہر سیٹ کے لیے، ٹاپ ٹین کلیدی الفاظ جدول 3 میں پیش کیے گئے ہیں۔ ہم نے لفظی طور پر ایک جیسے کلیدی الفاظ، جیسے "ڈرون" اور "ڈرونز" یا اسی طرح، "چیزوں کا انٹرنیٹ" اور "IoT" کو ملا کر تضادات کو ختم کیا۔
جدول 3 سے پتہ چلتا ہے کہ "بغیر پائلٹ ہوائی گاڑی" دونوں وقتوں میں "ڈرون" اور "بغیر پائلٹ فضائی نظام" کے مقابلے میں زیادہ کثرت سے استعمال ہونے والا کلیدی لفظ ہے۔ اس کے علاوہ، "ریموٹ سینسنگ،" "پریزین ایگریکلچر،" اور "زراعت" کو دونوں ادوار میں اعلیٰ درجہ دیا گیا ہے۔ پہلے دور میں، "پریسیزن ایگریکلچر" کو پانچویں نمبر پر رکھا گیا، اور دوسرے دور میں یہ دوسرے نمبر پر آیا، جو اس بات کی وضاحت کرتا ہے کہ کس طرح ڈرون درست زراعت کو حاصل کرنے میں تیزی سے اہم ہوتے جا رہے ہیں کیونکہ وہ نگرانی کر سکتے ہیں،
دیگر ریموٹ سینسنگ اور زمین پر مبنی نظاموں کے مقابلے میں پتہ لگانے، اور تخمینہ لگانے کے طریقے تیز، سستے اور انجام دینے میں آسان ہیں۔ اس کے علاوہ، وہ ضرورت پڑنے پر ان پٹ کی درست مقدار (مثلاً، پانی یا کیڑے مار ادویات) کا سپرے کر سکتے ہیں (Guo et al., 2020; Inoue, 2020; Panday, Pratihast, et al., 2020)۔
اکثر استعمال ہونے والے مطلوبہ الفاظ کی فہرست۔
درجہ بندی | 1990 2010 | کی تعداد واقعات | 2011 2021 | کی تعداد واقعات |
| 1 | بغیر پائلٹ ہوائی گاڑی | 28 | بغیر پائلٹ ہوائی گاڑی | 1628 |
| 2 | دور دراز سینسنگ | 7 | صحت سے متعلق زراعت | 489 |
| 3 | زراعت | 4 | دور دراز سینسنگ | 399 |
| 4 | ییربورن | 4 | ڈرون | 374 |
| 5 | صحت سے متعلق زراعت | 4 | بغیر پائلٹ فضائی نظام | 271 |
| 6 | بغیر پائلٹ ہوائی | 4 | زراعت | 177 |
| 7 | ہائپر اسپیکٹرل سینسر | 3 | گہری سیکھنے | 151 |
| 8 | مصنوعی اعصابی نیٹ ورک | 2 | مشین سیکھنے | 149 |
| 9 | خود مختار پرواز | 2 | پودوں انڈیکس | 142 |
| 10 | کافی | 2 | کا انٹرنیٹ چیزیں | 124 |
ایک اور دلچسپ خصوصیت تکمیلی ٹیکنالوجیز کی موجودگی ہے۔ پہلے مرحلے میں، "ہائپر اسپیکٹرل سینسر" اور "آرٹیفیشل نیورل نیٹ ورکس" (ANN) ٹاپ ٹین کلیدی الفاظ میں شامل ہیں۔ ہائپر اسپیکٹرل امیجنگ نے مختلف طول موج پر بڑی تعداد میں تصاویر جمع کرکے روایتی امیجنگ میں انقلاب برپا کیا۔ ایسا کرنے سے، سینسر ملٹی اسپیکٹرل امیجنگ، سپیکٹروسکوپی، اور آر جی بی امیجری (Adao ˜ et al.،
2017)۔ پہلے مرحلے میں "ANN" کی موجودگی اور دوسرے مرحلے میں "ڈیپ لرننگ" (DL) اور "مشین لرننگ" (ML) سے یہ ظاہر ہوتا ہے کہ زیادہ تر شائع شدہ کام ڈرون کے لیے AI تکنیک کی صلاحیت کی جانچ پر مرکوز ہیں۔ پر مبنی زراعت. اگرچہ ڈرون خود مختار طور پر پرواز کرنے کی صلاحیت رکھتے ہیں، لیکن پھر بھی انہیں پائلٹ کی شمولیت کی ضرورت ہوتی ہے، جس کا مطلب آلہ کی ذہانت کی کم سطح ہے۔ تاہم، یہ مسئلہ AI تکنیکوں کی ترقی کی وجہ سے حل کیا جا سکتا ہے، جو حالات سے متعلق بہتر آگاہی اور خود مختار فیصلے کی حمایت فراہم کر سکتی ہے۔ AI سے لیس، ڈرون نیویگیشن کے دوران تصادم سے بچ سکتے ہیں، مٹی اور فصل کے انتظام کو بہتر بنا سکتے ہیں (Inoue, 2020)، اور انسانوں کے لیے مشقت اور تناؤ کو کم کر سکتے ہیں (BK Sharma et al., 2019)۔
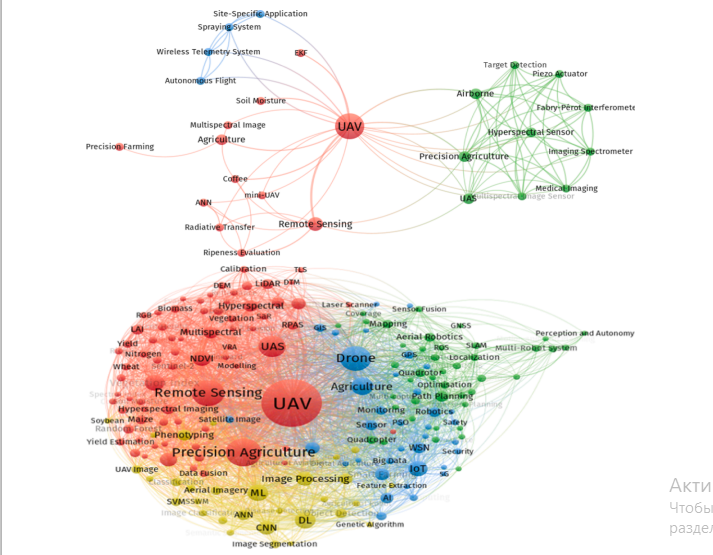
ان کی لچک اور وسیع مقدار میں نان لائنر ڈیٹا کو ہینڈل کرنے کی صلاحیت کی وجہ سے، AI تکنیکیں ڈرونز اور دیگر ریموٹ سینسنگ اور زمینی بنیادوں پر مبنی نظاموں کے ذریعے منتقل ہونے والے ڈیٹا کا تجزیہ کرنے کے لیے موزوں طریقے ہیں پیشین گوئی اور فیصلہ سازی کے لیے (Ali et al., 2015; Inoue، 2020)۔ مزید برآں، دوسرے دور میں "IoT" کی موجودگی زراعت میں اس کے ابھرتے ہوئے کردار کی نشاندہی کرتی ہے۔ IoT دیگر ٹیکنالوجیز بشمول ڈرون، ML، DL، WSNs اور بگ ڈیٹا کو باہم مربوط کرکے زراعت میں انقلاب برپا کر رہا ہے۔ IoT کو لاگو کرنے کے اہم فوائد میں سے ایک یہ ہے کہ اس کی مختلف کاموں (ڈیٹا کے حصول، ڈیٹا کا تجزیہ اور پروسیسنگ، فیصلہ سازی، اور عمل درآمد) کو قریب قریب حقیقی وقت میں مؤثر اور مؤثر طریقے سے ضم کرنے کی صلاحیت ہے (Elijah et al., 2018; Feng et al. 2019؛ Muangprathub et al.، 2019)۔ مزید برآں، ڈرونز کو پودوں کی طاقت اور پودوں کی خصوصیات کا حساب لگانے کے لیے ضروری ڈیٹا حاصل کرنے کے لیے موثر ٹولز سمجھا جاتا ہے (Candiago et al.، 2015)۔ تصویر 2a اور 2b دونوں مدتوں کے لیے مطلوبہ الفاظ کے تعاون کے نیٹ ورکس کی وضاحت کرتے ہیں۔
بااثر مصنفین
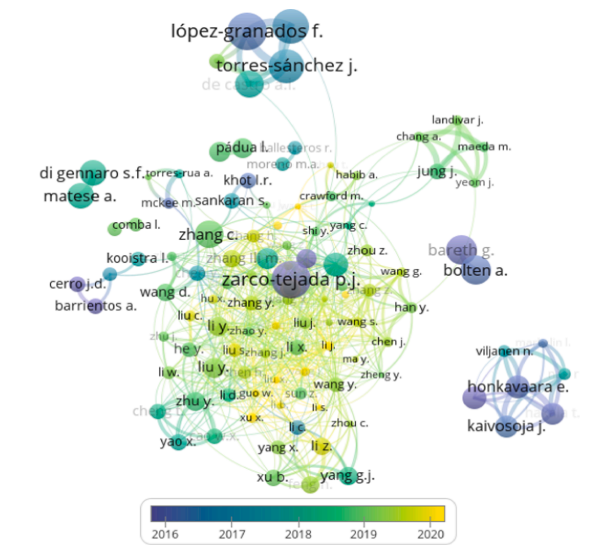
اس حصے میں، ہم بااثر مصنفین کا تعین کرتے ہیں اور اس بات کا جائزہ لیتے ہیں کہ مصنف کے حوالہ جات کے نیٹ ورک موجودہ ادب کو کس طرح تصور اور ترتیب دے سکتے ہیں۔ تصویر 3 سب سے زیادہ حوالہ جات کے ساتھ تمام محققین کی تاریخ کا احاطہ دکھاتا ہے۔ رنگ کا پیمانہ مصنفین کے حوالہ جات کے سال وار تغیر کو ظاہر کرتا ہے۔ ہم محققین کے حوالہ جات کے ڈھانچے کا جائزہ لیتے ہیں جنہوں نے کم از کم 50 حوالہ جات اور دس اشاعتوں کی حد کا استعمال کرتے ہوئے زرعی ڈرون پر مطالعات شائع کیں۔ سے باہر
12,891 مصنفین، صرف 115 نے اس شرط کو پورا کیا۔ جدول 4 میں سب سے اوپر دس بااثر مصنفین کی فہرست دی گئی ہے، جن کو حوالہ جات کی زیادہ سے زیادہ تعداد کے حساب سے ترتیب دیا گیا ہے۔ Lopez- Granados F. 1,963 حوالوں کے ساتھ فہرست میں سرفہرست ہے، اس کے بعد Zarco-Tejada PJ 1,909 حوالوں کے ساتھ ہے۔
سب سے زیادہ حوالہ دینے والے مصنفین کی فہرست۔
| رینکنگ | مصنف | تعریف خط |
| 1 | لوپیز گراناڈوس ´ ایف۔ | 1,963 |
| 2 | Zarco-Tejada PJ | 1,909 |
| 3 | پینا ˜ جے ایم | 1,644 |
| 4 | Torres-S' اینچز جے | 1,576 |
| 5 | فیریس ای | 1,339 |
| 6 | Remondino F | 1,235 |
| 7 | بولٹن اے | 1,160 |
| 8 | بریتھ جی | 1,155 |
| 9 | برنی جے اے | 1,132 |
| 10 | ڈی کاسٹرو اے آئی | 1,036 |
جب انفرادی اشاعتوں کی بات آتی ہے تو، Zhang and Kovacs (2012) کا مضمون Precision Agriculture میں شائع ہونے والا سب سے زیادہ حوالہ دیا جانے والا مطالعہ رہا ہے۔ اس کے ساتھ، مصنفین نے صحت سے متعلق زراعت میں UAS کے اطلاق کا جائزہ لیا۔ ان کی تحقیق کے نتائج بتاتے ہیں کہ کسانوں کو قابل اعتماد حتمی مصنوعات فراہم کرنے کے لیے پلیٹ فارم کے ڈیزائن، پروڈکشن، امیج جیوفرینسنگ کی معیاری کاری، اور معلومات کی بازیافت کے ورک فلو کو آگے بڑھانے کی ضرورت ہے۔ مزید برآں، وہ کسان کو زیادہ مضبوطی سے مشغول کرنے کی سفارش کرتے ہیں، خاص طور پر فیلڈ پلاننگ، تصویر کی گرفت کے ساتھ ساتھ ڈیٹا کی تشریح اور تجزیہ میں۔ اہم بات یہ ہے کہ یہ مطالعہ فیلڈ میپنگ، جوش کی نقشہ سازی، کیمیائی مواد کی پیمائش، پودوں کے تناؤ کی نگرانی، اور پودوں کی نشوونما پر کھادوں کے اثرات کی تشخیص میں UAV کی اہمیت کو ظاہر کرنے والے پہلے لوگوں میں شامل تھا۔ ٹیکنالوجی سے متعلق چیلنجوں میں ممنوعہ اخراجات، سینسر کی صلاحیت، پلیٹ فارم کی استحکام اور قابل اعتمادی، معیاری کاری کی کمی اور ڈیٹا کی بڑی مقدار کا تجزیہ کرنے کے لیے مستقل طریقہ کار بھی شامل ہیں۔
حوالہ تجزیہ
اقتباسات کا تجزیہ مضامین کے اثر و رسوخ کے مطالعہ کی نمائندگی کرتا ہے، اگرچہ بہاؤ کا خطرہ ہوتا ہے (مثال کے طور پر، حوالہ کا تعصب، خود حوالہ) اثر کی تشخیص کے لیے معیاری آلات میں سے ایک سمجھا جاتا ہے (Osareh, 1996; A. Rejeb et al., 2022; سرلی وغیرہ، 2010)۔ اقتباسات ایک مخصوص موضوع پر ادب میں مقالوں کی شراکت کی اہمیت اور جانداریت کی بھی عکاسی کرتے ہیں (R. Sharma et al., 2022)۔ ہم نے زرعی ڈرون کے بارے میں سب سے زیادہ بااثر مطالعات کا تعین کرنے کے لیے حوالہ جات کا تجزیہ کیا اور مندرجات کا خلاصہ کیا۔ جدول 5 1990–2010 اور 2011–2021 کے عرصے کے لیے پندرہ سب سے زیادہ بااثر کاغذات کی فہرست پیش کرتا ہے۔ Berni et al کے مضامین۔ (2009)b اور آسٹن (2010) 1990 اور 2010 کے دوران بالترتیب 831 اور 498 حوالوں کے ساتھ سب سے زیادہ حوالہ دیا گیا ہے۔ برنی وغیرہ۔ (2009)b نے ہیلی کاپٹر پر مبنی UAV کے ذریعے مقداری ریموٹ سینسنگ پروڈکٹس تیار کرنے کی صلاحیت کو واضح کیا ہے جس میں سستی تھرمل اور تنگ بینڈ ملٹی اسپیکٹرل امیجنگ سینسرز ہیں۔ روایتی انسان سے چلنے والے ہوا سے چلنے والے سینسرز کے مقابلے، زراعت کے لیے کم لاگت والا UAV نظام فصلوں کے بائیو فزیکل پیرامیٹرز کے تقابلی تخمینے حاصل کرنے کے قابل ہے، اگر بہتر نہیں ہے۔ سستی لاگت اور آپریشنل لچک، تیز رفتار تبدیلی کے وقت دستیاب اعلی اسپیکٹرل، مقامی، اور وقتی ریزولوشنز کے ساتھ ساتھ، UAVs کو ایسے ایپلی کیشنز کی ایک حد کے لیے موزوں بناتی ہے جن میں آبپاشی کے نظام الاوقات، اور درست کھیتی سمیت وقت کے اہم انتظام کی ضرورت ہوتی ہے۔ Berni et al کا کاغذ۔ (2009)b کا بہت زیادہ حوالہ دیا گیا ہے کیونکہ اس نے مؤثر طریقے سے بغیر پائلٹ کے روٹری ونگ پلیٹ فارم اور ڈیجیٹل اور تھرمل سینسرز کو زرعی ایپلی کیشنز کے لیے ضروری انشانکن میکانزم کے ساتھ مربوط کیا ہے۔ دوسری سب سے زیادہ حوالہ شدہ اشاعت آسٹن (2010) کی تصنیف کردہ کتاب ہے، جس نے ڈیزائن، ترقی، اور تعیناتی کے نقطہ نظر سے UAVs پر بحث کی۔ زراعت میں، UAVs فصلوں کی رنگت کی تبدیلیوں کے ذریعے بیماریوں کا جلد پتہ لگا کر، فصل کی بوائی اور اسپرے میں سہولت فراہم کرکے، اور ریوڑ کی نگرانی اور گاڑی چلاتے ہوئے فصل کی نگرانی میں معاونت کرتی ہے۔
سلیوان ایٹ ال کے مطالعہ. (2007)، Lumme et al. (2008)، اور Gokto ¨ ǧan et al. (2010) سرفہرست پندرہ سب سے زیادہ حوالہ دیئے گئے مضامین کی فہرست کو ختم کریں۔ یہ مضامین زراعت کو سپورٹ کرنے کے لیے UAV پر مبنی نظاموں کی ترقی کی مثال دیتے ہیں۔ وہ مختلف مسائل کا حل پیش کرتے ہیں، جیسے کہ فصل کی نگرانی اور اسکیننگ، جڑی بوٹیوں کی نگرانی اور انتظام، اور فیصلے کی حمایت۔ وہ نمونے لینے کی کارکردگی میں اضافہ کرنے اور درست اور موثر وضع کرنے میں کاشتکاروں کی مدد کرنے کے لیے UAV کی صلاحیت کے بارے میں بھی تجویز اور تبادلہ خیال کرتے ہیں۔
پودے لگانے کی حکمت عملی. دو مقالے برنی (Berni et al., 2009b; Berni et al., 2009a) کے تصنیف کیے گئے تھے، جو کہ زرعی ڈرون سے متعلق تحقیق پر ان کے اہم اثرات کو اجاگر کرتے ہیں۔ Zarco-Tejada et al کا کاغذ۔ (2014) درختوں کی اونچائی کی مقدار کے تعین میں کم لاگت والے UAV امیجری کو استعمال کرنے کی ضرورت کو واضح کرنے کے لیے اہم مطالعات میں شامل ہے۔
سب سے زیادہ حوالہ شدہ اشاعتوں کی فہرست۔
| درجہ بندی | سہ پہر ۱ بجکر ۳۰ منٹ سے سہ پہر ۲ بجے تک | سہ پہر ۱ بجکر ۳۰ منٹ سے سہ پہر ۲ بجے تک | ||
| دستاویز | نظیر | دستاویز | نظیر | |
| 1 | (Berni et al.، 2009b) | 831 | (C. Zhang & Kovacs, 2012) | 967 |
| 2 | (آسٹن، 2010) | 498 | (Nex & Remondino، 2014) | 893 |
| 3 | (Hunt et al.، 2010) | 331 | (فلوریانو اور لکڑی، 2015) | 552 |
| 4 | (SR Herwitz et al.، 2004) | 285 | (حسین موتلغ وغیرہ، 2016) | 391 |
| 5 | (CCD Lelong et al.، 2008) | 272 | (شخاتریح وغیرہ، 2019) | 383 |
| 6 | (Berni et al.، 2009b) | 250 | (Ma et al.، 2017) | 373 |
| 7 | (Grenzdorffer ¨ et al.، 2008) | 198 | (Bendig et al.، 2014) | 360 |
| 8 | (حربر وغیرہ، 2005) | 175 | (زرکو-تیجاڈا وغیرہ، 2014) | 347 |
| 9 | (Y. Huang et al.، 2009) | 129 | (اشتہار ao et al., 2017) | 335 |
| 10 | (Schmale III et al.، 2008) | 119 | (ہونکاوارا وغیرہ، 2013A) | 331 |
| 11 | (عبدالرحمن وغیرہ، 2005) | 79 | (Candiago et al.، 2015) | 327 |
| 12 | (Techy et al.، 2010) | 69 | (ژیانگ اور تیان، 2011) | 307 |
| 13 | (Sullivan et al.، 2007) | 51 | (Matese et al.، 2015) | 303 |
| 14 | (Lumme et al.، 2008) | 42 | (Gago et al.، 2015) | 275 |
| 15 | (Gokto ¨ ǧan et al.، 2010) | 40 | (Aasen et al.، 2015a) | 269 |
دوسری مدت (2011–2021) میں، Zhang and Kovacs (2012) اور Nex and Remondino (2014) کی تحقیق کے نتیجے میں سب سے زیادہ کثرت سے نقل کی جانے والی اشاعتیں سامنے آئیں۔ Zhang and Kovacs (2012) دلیل دیتے ہیں کہ قطعی زراعت کو جغرافیائی تکنیکوں اور سینسرز، جیسے جغرافیائی معلوماتی نظام، GPS، اور ریموٹ سینسنگ کو لاگو کرنے سے فائدہ ہو سکتا ہے، تاکہ میدان میں تغیرات کو پکڑا جا سکے اور متبادل حکمت عملیوں کو استعمال کر کے ان سے نمٹا جا سکے۔ صحت سے متعلق زراعت میں گیم چینجر کے طور پر، ڈرون کو اپنانے نے ریموٹ سینسنگ، فضائی مشاہدے کو آسان بنانے، فصلوں کی نشوونما کے اعداد و شمار، مٹی کے حالات، اور اسپرے کرنے والے علاقوں میں ایک نئے دور کا آغاز کیا ہے۔ Zhang and Kovacs (2012) کا جائزہ بنیادی ہے کیونکہ یہ UAVs کے بارے میں بصیرت پیش کرتا ہے تاکہ ماحولیاتی نگرانی اور صحت سے متعلق زراعت میں ان آلات کے موجودہ استعمال اور چیلنجز، جیسے کہ پلیٹ فارم اور کیمرے کی حدود، ڈیٹا پروسیسنگ کے چیلنجز، کسانوں کی مصروفیت، اور ہوابازی کے ضوابط۔ . دوسرا
Nex and Remondino (2014) کے سب سے زیادہ حوالہ شدہ مطالعہ نے زمین کی تصاویر کو کیپچر کرنے، پروسیسنگ کرنے اور تجزیہ کرنے کے لیے UAVs کے فن کی حالت کا جائزہ لیا۔
ان کے کام نے کئی UAV پلیٹ فارمز، ایپلی کیشنز، اور استعمال کے کیسز کا ایک جائزہ بھی پیش کیا، جس میں UAV امیج پروسیسنگ میں جدید ترین پیش رفت کی نمائش کی گئی۔ زراعت میں، کسان لاگت اور وقت کی بچت حاصل کرنے، نقصانات کا تیز اور درست ریکارڈ حاصل کرنے، اور ممکنہ مسائل کا اندازہ لگانے کے لیے مؤثر فیصلے کرنے کے لیے UAVs کا استعمال کر سکتے ہیں۔ روایتی فضائی پلیٹ فارمز کے برعکس، UAVs آپریشنل اخراجات کو کم کر سکتے ہیں اور سخت مقامات تک رسائی کے خطرے کو کم کر سکتے ہیں جبکہ ابھی بھی اعلیٰ درستگی کی صلاحیت کو محفوظ رکھتے ہیں۔ ان کا مقالہ UAVs کے مختلف فوائد کا خلاصہ کرتا ہے، خاص طور پر درستگی اور ریزولوشن کے لحاظ سے۔
2011 اور 2021 کے درمیان باقی تیرہ سب سے زیادہ حوالہ شدہ اشاعتوں میں، ہم نے امیجنگ مشنز میں ڈرون ایپلی کیشنز سے منسلک تحقیق پر زیادہ توجہ دیکھی (Bendig et al.، 2014؛ Ma et al.، 2017؛ Zarco-Tejada et al.، 2014) ، صحت سے متعلق زراعت (Candiago et al.، 2015; Honkavaara et al., 2013a)، precision viticulture (Matese et al.، 2015)، پانی کے تناؤ کی تشخیص (Gago et al.، 2015)، اور Vegetation مانیٹرنگ (Asen. ، 2015a)۔ ابتدائی سالوں میں، محققین نے توجہ مرکوز کی
زراعت کے لیے کم لاگت، ہلکا پھلکا، اور درست UAV پر مبنی نظام تیار کرنے پر مزید۔ حالیہ تحقیق نے زراعت اور فیلڈ سروے کے لیے UAV ایپلی کیشنز کے جائزوں پر زیادہ توجہ مرکوز کی ہے۔ خلاصہ طور پر، اس تجزیہ سے پتہ چلتا ہے کہ بااثر اشاعتوں نے زیادہ تر UAVs کی موجودہ سائنسی اور تکنیکی حیثیت کا جائزہ لینے کے لیے پیشگی مطالعات کے جائزے فراہم کیے ہیں اور درست زراعت کو سپورٹ کرنے کے لیے UAV سسٹم تیار کیے ہیں۔ دلچسپ بات یہ ہے کہ ہمیں تجرباتی طور پر کام کرنے والے مطالعات نہیں ملے
طریقہ کار یا وضاحتی کیس اسٹڈیز، جو کہ ایک اہم علمی فرق کو تشکیل دیتا ہے اور اس موضوع پر مزید تحقیق کا مطالبہ کرتا ہے۔
مشترکہ حوالہ تجزیہ
Gmür (2006) کے مطابق، حوالہ جات کا تجزیہ اسی طرح کی اشاعتوں کی نشاندہی کرتا ہے اور انہیں کلسٹر کرتا ہے۔ ایک جھرمٹ کی احتیاط سے جانچ پڑتال اشاعتوں کے درمیان تحقیق کے ایک مشترکہ شعبے کو ظاہر کر سکتی ہے۔ ہم متعلقہ مضامین کے علاقوں کی وضاحت کرنے اور اشاعتوں کے فکری نمونوں کا پتہ لگانے کے لیے زرعی ڈرون سے متعلق لٹریچر کے مشترکہ حوالہ کی چھان بین کرتے ہیں۔ اس سلسلے میں، سمال (1973) نے سب سے زیادہ اثر انگیز اور بنیادی تحقیق کا مطالعہ کرنے کے لیے cocitation analysis کے استعمال کی سفارش کی۔
ایک نظم و ضبط کے اندر سیٹ کو سب سے اہم مضامین تک محدود کرنے کے لیے (گوئل اور کمار، 2021)، ہم نے 25 کی ایک مشترکہ حوالہ کی حد مقرر کی ہے، اس کا مطلب ہے کہ 25 یا اس سے زیادہ مختلف اشاعتوں کی حوالہ فہرستوں میں دو مضامین کا ایک ساتھ حوالہ دیا جانا چاہیے۔ کلسٹرنگ بھی کم از کم کلسٹر سائز 1 کے ساتھ اور چھوٹے کلسٹرز کو بڑے کے ساتھ ضم کرنے کے کسی طریقہ کے بغیر کی گئی تھی۔ نتیجتاً، مطالعات کی مماثلت اور ان کی فکری ساخت کی بنیاد پر چھ کلسٹرز بنائے گئے۔ جدول 6 ہر کلسٹر میں اشاعتوں کی تقسیم کو ظاہر کرتا ہے۔
کلسٹر 1: یہ کلسٹر اٹھارہ دستاویزات پر مشتمل ہے جو اس کلسٹر میں شائع ہونے والی اشاعتوں میں ماحولیاتی نگرانی، فصلوں کے انتظام اور جڑی بوٹیوں کے انتظام میں ڈرون کے کردار کے بارے میں بات کی گئی ہے۔ مثال کے طور پر، Manfreda et al. (2018) قدرتی زرعی ماحولیاتی نظام کی نگرانی میں UAV کی موجودہ تحقیق اور نفاذ کا ایک جائزہ فراہم کرتے ہیں اور دلیل دیتے ہیں کہ یہ ٹیکنالوجی ماحولیاتی نگرانی کو تیزی سے بڑھانے اور کم کرنے کی زبردست صلاحیت فراہم کرتی ہے۔
فیلڈ آبزرویشن اور روایتی ہوا اور اسپیس برن ریموٹ سینسنگ کے درمیان موجودہ فرق۔ یہ ایک سستی طریقے سے بڑے علاقوں میں بہتر وقتی بازیافت اور مقامی بصیرت کے لیے نئی صلاحیت کی پیشکش کر کے کیا جا سکتا ہے۔ UAVs ماحول کو مسلسل محسوس کر سکتے ہیں اور نتیجے میں ڈیٹا کو ذہین، مرکزی/ وکندریقرت اداروں کو بھیج سکتے ہیں جو سینسرز کو کنٹرول کرتے ہیں تاکہ حتمی مسائل کی نشاندہی کی جا سکے، جیسے کہ بیماری یا پانی کی نشاندہی کی کمی (Padua ´ et al., 2017)۔ Adao ˜ et al. (2017) یہ کہتا ہے کہ UAVs پانی کی حیثیت، بایوماس کے تخمینہ، اور جوش کی تشخیص سے متعلق خام ڈیٹا کی ایک وسیع مقدار کو حاصل کرکے پودوں کے حالات کا اندازہ لگانے کے لیے مثالی ہیں۔ ریموٹ سینسنگ ڈیٹا کی بروقت گرفتاری کی اجازت دینے کے لیے مناسب ماحولیاتی حالات میں UAV-ماؤنٹڈ سینسر بھی فوری طور پر تعینات کیے جا سکتے ہیں (Von Bueren et al., 2015)۔ UAVs کے ذریعے، کسان اندرونی کھیتی باڑی کے ماحول کی سہ جہتی جگہ (مثال کے طور پر گرین ہاؤس) میں عملی طور پر کسی بھی جگہ سے پیمائش حاصل کر کے انڈور کاشتکاری کی سرگرمیاں انجام دینے کے قابل ہوتے ہیں، اس طرح مقامی موسمیاتی کنٹرول اور پودوں کی نگرانی کو یقینی بناتے ہیں (Roldan' et al) .، 2015)۔ درستگی کے تناظر میں
زراعت، فصلوں کے انتظام کے فیصلوں کے لیے مناسب وقتی اور مقامی ریزولیوشن کے ساتھ درست، قابل اعتماد فصل ڈیٹا کی ضرورت ہوتی ہے (Gebbers & Adamchuk, 2010; Gevaert et al., 2015; Maes & Steppe, 2019)۔ اس وجہ سے، Agüera Vega et al. (2015) بڑھتے ہوئے موسم کے دوران سورج مکھی کی فصل کی تصاویر حاصل کرنے کے لیے UAV-ماونٹڈ ملٹی اسپیکٹرل سینسر سسٹم کا استعمال کیا۔ اسی طرح ہوانگ وغیرہ۔ (2009) نوٹ کریں کہ UAVs پر مبنی ریموٹ سینسنگ جمع کردہ اسپیکٹرل ڈیٹا سے فصلوں اور مٹی کی پیمائش کو آسان بنا سکتی ہے۔ ورجر وغیرہ۔ (2014) نے گندم اور ریپسیڈ کی فصلوں پر توجہ مرکوز کرتے ہوئے صحت سے متعلق زراعت کی ایپلی کیشنز میں UAV عکاسی پیمائش سے گرین ایریا انڈیکس (GAI) کا تخمینہ لگانے کے لیے ایک تکنیک تیار اور تجربہ کیا۔ لہٰذا، ڈرون بار بار نظرثانی اور اعلیٰ مقامی ریزولیوشن کے ساتھ فصل کی حالت کی معلومات کو بازیافت کرنے کے نئے امکانات فراہم کرتے ہیں (ڈونگ ایٹ ال۔
زرعی ڈرون پر بااثر اشاعتوں کا جھرمٹ۔
| کلسٹر | وسیع تھیم | حوالہ جات |
| 1 | ماحولیاتی نگرانی، فصل انتظام، گھاس کا انتظام | (اشتہار ao et al., 2017; اگیرا ویگا et al.، 2015؛ ڈی کاسٹرو وغیرہ، 2018؛ Gomez-Cand ´ et al.، 2014 پر؛ YB ہوانگ وغیرہ، 2013؛ خانال وغیرہ، 2017; لوپیز-گریناڈوس، ´ 2011؛ Manfreda et al., 2018; پی' عدوا وغیرہ، 2017; Pena ˜ et al.، 2013؛ پیریز-اورٹیز et al.، 2015؛ راسموسن وغیرہ، 2013، 2016; Torres-S' anchez et al.، 2014؛ Torres-Sanchez، ´ Lopez-Granados, ´ & پینا، ˜ 2015؛ Verger et al.، 2014؛ وون Bueren et al., 2015; C. ژانگ اور Kovacs، 2012) |
| 2 | ریموٹ فینو ٹائپنگ، پیداوار تخمینہ، فصل کی سطح کا ماڈل، پودوں کی گنتی | (Bendig et al.، 2013، 2014؛ Geipel وغیرہ، 2014؛ Gnadinger ¨ & Schmidhalter, 2017; ہگیہتلاب وغیرہ، 2016؛ Holman et al., 2016; جن وغیرہ، 2017؛ W. Li et al.، 2016؛ Maimaitijiang et al., 2017; سنکرن et al.، 2015؛ Schirrmann et al.، 2016; شی وغیرہ، 2016؛ Yue et al., 2017; ایکس. Zhou et al.، 2017) |
| 3 | پانی کے لیے تھرمل امیجنگ، ملٹی اسپیکٹرل امیجنگ | (بلوجا وغیرہ، 2012؛ برنی وغیرہ، 2009b; Berni et al., 2009a ; کینڈیاگو et al.، 2015؛ Gago et al.، 2015؛ Gonzalez-Dugo et al., 2013, 2014; Grenzdorffer ¨ et al.، 2008؛ خلیق وغیرہ، 2019؛ Matese et al.، 2015؛ Ribeiro-Gomes et al.، 2017؛ Santesteban et al., 2017; Uto et al. 2013) |
| 4 | ہائپرسیکٹرل امیجنگ، سپیکٹرل امیجنگ | (Aasen et al.، 2015a؛ Bareth et al.، 2015; Hakala et al.، 2013؛ Honkavaara et al., 2013a; لوسیئر وغیرہ، 2014؛ ساری وغیرہ، 2011؛ Suomalainen et al.، 2014) |
| 5 | تھری ڈی میپنگ ایپلی کیشنز | (Jim’enez-Brenes et al., 2017; Nex & Remondino, 2014; سلامی وغیرہ، 2014; Torres-S' اینچیز، لوپیز- ´ Granados, Serrano, et al., 2015; زہاوی وغیرہ، 2015؛ زارکو-تیجادہ اور ایل، 2014) |
| 6 | زراعت کی نگرانی | (SR Herwitz et al.، 2004؛ Hunt وغیرہ، 2010؛ CCD Lelong et al. 2008; Primicerio et al.، 2012؛ ژیانگ اور تیان، 2011) |
مزید برآں، ڈرونز زراعت کے چیلنجنگ کاموں کے لیے کارآمد ہیں، بشمول گھاس کا نقشہ بنانا۔ آلات کے ذریعے حاصل کی گئی تصاویر نے کھیتوں میں جڑی بوٹیوں کی جلد پتہ لگانے کے لیے ان کی افادیت کو ثابت کیا ہے (de Castro et al. 2018؛ روزنبرگ وغیرہ، 2017)۔ اس سلسلے میں ڈی کاسٹرو وغیرہ۔ (2021) یہ کہتا ہے کہ UAV امیجری اور آبجیکٹ بیسڈ امیج اینالیسس (OBIA) کے انضمام نے پریکٹیشنرز کو ابتدائی موسم کے گھاس کے میدانوں کی فصلوں میں ابتدائی پتہ لگانے کے مسئلے پر قابو پانے کے قابل بنایا ہے، جو گھاس کی تحقیق میں ایک بڑا قدم ہے۔ اسی طرح، Pena ˜ et al. (2016) اس بات کی نشاندہی کرتا ہے کہ UAV سے انتہائی اعلی مقامی ریزولیوشن امیجز کا استعمال OBIA طریقہ کار کے ساتھ مل کر مکئی کی ابتدائی فصلوں میں جڑی بوٹیوں کے نقشے بنانا ممکن بناتا ہے جو کہ موسم میں جڑی بوٹیوں پر قابو پانے کے اقدامات کے نفاذ کی منصوبہ بندی میں استعمال کیا جا سکتا ہے۔ سیٹلائٹ اور روایتی ہوائی تصاویر کی صلاحیت سے باہر کام۔ تصویر کی درجہ بندی یا آبجیکٹ کا پتہ لگانے والے الگورتھم کے مقابلے میں، سیمنٹک سیگمنٹیشن کی تکنیک گھاس کی نقشہ سازی کے کاموں میں زیادہ موثر ہیں (J. Deng et al., 2021)، اس طرح کسانوں کو کھیت کے حالات کا پتہ لگانے، نقصانات کو کم کرنے، اور بڑھتے ہوئے موسم کے دوران پیداوار کو بہتر بنانے میں مدد ملتی ہے (رمیش) وغیرہ، 2018)۔ گہری سیکھنے کی بنیاد پر سیمنٹک سیگمنٹیشن ہائی ریزولوشن ایریل امیجز (رمیش ایٹ ال۔، 2013؛ اے زینگ ایٹ ال۔، 2020) سے پودوں کے احاطہ کی درست پیمائش بھی فراہم کر سکتی ہے۔ ریموٹ کے لئے ان کی صلاحیت کے باوجود
سینسنگ پکسل کی درجہ بندی، سیمنٹک سیگمنٹیشن تکنیک کے لیے اہم حساب اور ایک ممنوعہ طور پر اعلی GPU میموری کی ضرورت ہوتی ہے (J. Deng et al., 2020)۔
مشین لرننگ اور UAV کی بنیاد پر P´erez-Ortiz et al. (2015) نے ایک گھاس کی نقشہ سازی کے نقطہ نظر کی تجویز پیش کی تاکہ سائٹ کے ساتھ مخصوص جڑی بوٹیوں پر قابو پانے کی حکمت عملی فراہم کی جا سکے جب کسان ابتدائی طور پر ابھرنے کے بعد جڑی بوٹیوں کے کنٹرول کو اپناتے ہیں۔ آخر میں، Rasmussen et al. (2013) نے روشنی ڈالی کہ ڈرون سستی سینسنگ فراہم کرتے ہیں جس میں مقامی ریزولوشن لچکدار ہے۔ مجموعی طور پر، اس کلسٹر کی اشاعتیں ریموٹ سینسنگ، فصل کی نگرانی، اور گھاس کی نقشہ سازی میں مدد کے لیے UAVs کی صلاحیتوں کو تلاش کرنے پر توجہ مرکوز کرتی ہیں۔ مزید تحقیق کرنے کے لیے اضافی گہرائی سے تحقیق کی ضرورت ہے کہ ماحولیاتی نگرانی، فصلوں کے انتظام، اور جڑی بوٹیوں کی نقشہ سازی میں ڈرون ایپلی کیشنز کس طرح زیادہ پائیدار زراعت حاصل کر سکتی ہیں (Chamuah & Singh, 2019; Islam et al., 2021; Popescu et al., 2020; J Su, Liu, et al., 2018) اور فصل انشورنس ایپلی کیشنز میں اس ٹیکنالوجی کے گورننس کے مسائل کو حل کریں (Basnet & Bang, 2018; Chamuah & Singh, 2019, 2022; Meinen & Robinson, 2021)۔ محققین کو پروسیس شدہ ڈیٹا کے حتمی معیار کو بڑھانے کے لیے موثر پروسیسنگ تکنیک کے ساتھ UAV جمع شدہ پیمائش کی توثیق کرنے پر توجہ مرکوز کرنی چاہیے (Manfreda et al., 2018)۔ مزید برآں، مناسب الگورتھم کی ترقی جو ڈیجیٹل امیجز میں گھاس کو ظاہر کرنے والے پکسلز کو پہچانتے ہیں اور UAV ویڈ میپنگ کے دوران غیر متعلقہ پس منظر کو ختم کرنے کی ضرورت ہے (Gaˇsparovi'c et al., 2020; Hamylton et al., 2020; H. Huang et al. , 2018, 2020; لوپیز- ´ Granados et al., 2016)۔ پودوں کی شناخت، پتوں کی درجہ بندی، اور بیماری کی نقشہ سازی میں سیمنٹک سیگمنٹیشن تکنیک کو اپنانے پر اضافی تحقیق خوش آئند ہے (Fuentes-Pacheco et al., 2019; Kerkech et al., 2020)۔
کلسٹر 2۔ اس کلسٹر کی اشاعتیں زرعی ڈرون کے کئی پہلوؤں پر مرکوز تھیں۔ ریموٹ فینوٹائپنگ سے متعلق، سنکرن وغیرہ۔ (2015) نے کھیت میں فصلوں کی فوری فینوٹائپنگ کے لیے UAVs کے ساتھ کم اونچائی، ہائی ریزولوشن ایریل امیجنگ کے استعمال کی صلاحیت کا جائزہ لیا، اور وہ دلیل دیتے ہیں کہ، زمین پر مبنی سینسنگ پلیٹ فارمز کے مقابلے میں، مناسب سینسرز کے ساتھ چھوٹے UAVs کئی فوائد پیش کرتے ہیں۔ ، جیسے فیلڈ تک آسان رسائی، اعلی ریزولیوشن ڈیٹا، موثر ڈیٹا اکٹھا کرنا،
میدان کی ترقی کے حالات، اور کم آپریشنل اخراجات کا تیز رفتار جائزہ۔ تاہم، مصنفین یہ بھی نوٹ کرتے ہیں کہ فیلڈ فینوٹائپنگ کے لیے UAV کا موثر اطلاق دو بنیادی عناصر پر انحصار کرتا ہے، یعنی UAV خصوصیات (مثال کے طور پر، حفاظت، استحکام، پوزیشننگ، خود مختاری) اور سینسر کی خصوصیات (مثلاً، ریزولوشن، وزن، طیف طول موج، فیلڈ۔ نقطہ نظر)۔ ہغیثلاب وغیرہ۔ (2016) نے UAV امیجری سے پلاٹ کی سطح کے ڈیٹا کو بازیافت کرنے اور افزائش کے عمل کو تیز کرنے کے لیے ایک نیم خودکار امیج پروسیسنگ پائپ لائن کی تجویز پیش کی۔ ہولمین وغیرہ۔ (2016) ایک اعلی تیار کیا
تھرو پٹ فیلڈ فینوٹائپنگ سسٹم اور اس بات پر روشنی ڈالی کہ UAV معیاری، بڑی، فیلڈ پر مبنی فینوٹائپک ڈیٹا اکٹھا کرنے کے قابل ہے، اور یہ کہ ڈیوائس بڑے علاقوں اور مختلف فیلڈ مقامات کے لیے موثر ہے۔
چونکہ پیداوار کا تخمینہ معلومات کا ایک ناقابل یقین حد تک اہم حصہ ہے، خاص طور پر جب وقت پر دستیاب ہو، UAVs کے لیے تمام فیلڈ پیمائش فراہم کرنے اور اعلیٰ معیار کے ڈیٹا کو مؤثر طریقے سے حاصل کرنے کی صلاحیت موجود ہے (Daakir et al.، 2017؛ Demir et al.، 2018) ؛ Enciso et al.، 2019؛ Kulbacki et al.، 2018؛ Pudelko et al.، 2012)۔ اس سلسلے میں جن وغیرہ۔ (2017) نے ظہور کے مرحلے پر گندم کے پودے کی کثافت کا اندازہ لگانے کے لیے ایک طریقہ تیار کرنے اور اس کا اندازہ لگانے کے لیے بہت کم اونچائی پر UAVs کے ذریعے حاصل کردہ ہائی ریزولیوشن امیجری کا فائدہ اٹھایا۔ مصنفین کے مطابق، UAVs کیمروں سے لیس روور سسٹم کی حدود پر قابو پاتے ہیں اور فصلوں میں پودوں کی کثافت کا اندازہ لگانے کے لیے ایک غیر جارحانہ طریقہ کی نمائندگی کرتے ہیں، جس سے کسانوں کو مٹی کی ٹریفکیبلٹی سے آزاد فیلڈ فینوٹائپنگ کے لیے ضروری اعلی تھرو پٹ حاصل کرنے کی اجازت ملتی ہے۔ لی وغیرہ۔ (2016) نے مکئی کے پیرامیٹرز کا اندازہ لگانے کے لیے UAV پر مبنی نظام کا استعمال کرتے ہوئے انتہائی اعلی ریزولیوشن کے ساتھ سینکڑوں سٹیریو امیجز اکٹھی کیں، بشمول چھتری کی اونچائی اور زمین سے اوپر کا بایوماس۔ آخر میں، Yue et al. (2017) نے پایا کہ UAVs سے طے کی گئی فصل کی اونچائی اوپری زمینی بایوماس (AGB) تخمینہ کو بڑھا سکتی ہے۔
فصل کی نشوونما پر نظر رکھنے کا ایک نقطہ نظر فصل کی سطح کے ماڈل تیار کرنے کا خیال ہے (Bendig et al., 2014, 2015; Holman et al., 2016; Panday, Shrestha, et al., 2020; Sumesh et al., 2021)۔ کئی مطالعات نے پودوں کی اونچائی کو پکڑنے اور ان کی نشوونما کی نگرانی کے لیے UAV سے لی گئی تصاویر کی فزیبلٹی کو اجاگر کیا۔ مثال کے طور پر، Bendig et al. (2013) نے UAV کا استعمال کرتے ہوئے 0.05 میٹر سے کم کی بہت زیادہ ریزولوشن کے ساتھ کثیر وقتی فصل کی سطح کے ماڈلز کی ترقی کو بیان کیا۔ ان کا مقصد فصل کا پتہ لگانا تھا۔
ترقی کی تغیر اور فصل کے علاج، کاشت کاری اور تناؤ پر اس کا انحصار۔ Bendig et al. (2014) فصل کی سطح کے ماڈلز سے نکالے گئے پودوں کی اونچائی کی بنیاد پر تازہ اور خشک بایوماس کا تخمینہ لگانے کے لیے UAVs کا استعمال کیا اور پتہ چلا کہ ہوا سے چلنے والے پلیٹ فارمز اور ٹیریسٹریل لیزر سکیننگ کے برعکس، UAVs کی ہائی ریزولیوشن تصاویر مختلف نمو کے لیے پودوں کی اونچائی کے ماڈلنگ کی درستگی کو نمایاں طور پر بڑھا سکتی ہیں۔ مراحل اسی رگ میں، Geipel et al. (2014) نے تصویر حاصل کرنے کے لیے اپنی تحقیق میں UAVs کا استعمال کیا۔
ابتدائی سے وسط موسم تک تین مختلف ترقی کے مراحل میں مکئی کے دانے کی پیداوار کی پیشن گوئی کے لیے ڈیٹا سیٹس اور یہ نتیجہ اخذ کیا کہ فضائی امیجز اور فصل کی سطح کے ماڈلز کی بنیاد پر سپیکٹرل اور مقامی ماڈلنگ کا امتزاج مڈ سیزن مکئی کی پیداوار کی پیشین گوئی کے لیے موزوں طریقہ ہے۔ آخر میں، Gnadinger ¨ اور Schmidhalter (2017) نے درست فینوٹائپنگ میں UAV کی افادیت کا جائزہ لیا اور اس بات پر روشنی ڈالی کہ اس ٹیکنالوجی کا استعمال فارم مینجمنٹ کو بڑھا سکتا ہے اور افزائش اور زرعی مقاصد کے لیے فیلڈ تجربات کو قابل بنا سکتا ہے۔ مجموعی طور پر، ہم مشاہدہ کرتے ہیں کہ کلسٹر 2 کی اشاعتیں ریموٹ میں UAVs کے اہم فوائد پر مرکوز ہیں۔
فینوٹائپنگ، پیداوار کا تخمینہ، فصل کی سطح کی ماڈلنگ، اور پودوں کی گنتی۔ مستقبل کے مطالعے ریموٹ فینوٹائپنگ کے لیے نئے طریقے تیار کر کے گہرائی میں کھود سکتے ہیں جو دور سے محسوس کیے گئے ڈیٹا کی پروسیسنگ کو خودکار اور بہتر بنا سکتے ہیں (باراباسچی ایٹ ال۔ ، 2016)۔ اس کے علاوہ، UAVs پر نصب IoT سینسر کی کارکردگی اور ان کی لاگت، محنت، اور پیداوار کے تخمینے کی درستگی کے درمیان تجارت میں تحقیق کی ضرورت ہے۔
مستقبل (Ju & Son, 2018a, 2018b; Xie & Yang, 2020; Yue et al., 2018)۔ بالآخر، امیج پروسیسنگ کے موثر طریقے تیار کرنے کی ضرورت ہے جو قابل اعتماد معلومات پیدا کر سکیں، زرعی پیداوار میں کارکردگی کو زیادہ سے زیادہ کر سکیں، اور کسانوں کے دستی گنتی کے کام کو کم سے کم کر سکیں (RU Khan et al., 2021; Koh et al., 2021; Lin اور گو، 2020؛ C. Zhang et al.، 2020)۔
کلسٹر 3۔ اس کلسٹر کی اشاعتیں UAV پلیٹ فارمز پر استعمال ہونے والے زرعی وسائل کی ریموٹ سینسنگ کے لیے مختلف قسم کے امیجنگ سسٹمز پر بحث کرتی ہیں۔ اس سلسلے میں، تھرمل امیجنگ فصلوں کو پہنچنے والے نقصان کو روکنے اور خشک سالی کے تناؤ کا جلد پتہ لگانے کے لیے سطح کے درجہ حرارت کی نگرانی کی اجازت دیتی ہے (Awais et al., 2022; García-Tejero et al., 2018; Sankaran et al., 2015; Santesteban et al. 2017؛ یوم، 2021)۔ بلوجا وغیرہ۔ (2012) نے زور دیا کہ جہاز پر ملٹی اسپیکٹرل اور تھرمل کیمروں کا استعمال
UAV نے محققین کو ہائی ریزولیوشن امیجز حاصل کرنے اور بیل کے پانی کی حیثیت کا اندازہ کرنے کے قابل بنایا۔ یہ ریموٹ سینسنگ ڈیٹا (بلوجا ایٹ ال۔، 2012) کا استعمال کرتے ہوئے نوول واٹر شیڈولنگ ماڈل تیار کرنے کے لیے مفید ہو سکتا ہے۔ کی وجہ سے
UAVs کی محدود بوجھ کی گنجائش، Ribeiro-Gomes et al. (2017) نے پودوں میں پانی کے تناؤ کا تعین کرنے کے لیے UAVS میں غیر کولڈ تھرمل کیمروں کے انضمام پر غور کیا، جو اس قسم کی UAVs کو روایتی سیٹلائٹ پر مبنی ریموٹ سینسنگ اور ٹھنڈے تھرمل کیمروں سے لیس UAVs سے زیادہ موثر اور قابل عمل بناتا ہے۔ مصنفین کے مطابق، ٹھنڈے ہوئے تھرمل کیمرے ٹھنڈے کیمروں سے ہلکے ہوتے ہیں، جس کے لیے مناسب انشانکن کی ضرورت ہوتی ہے۔ Gonzalez-Dugo et al. (2014) سے پتہ چلتا ہے کہ تھرمل امیجری مؤثر طریقے سے فصلوں کے پانی کے دباؤ کے اشاریوں کے مقامی نقشے تیار کرتی ہے تاکہ پانی کی کیفیت کا اندازہ لگایا جا سکے اور لیموں کے باغات کے اندر اور اندر پانی کے تناؤ کی مقدار معلوم کی جا سکے۔ Gonzalez-Dugo et al. (2013) اور Santesteban et al. (2017) نے تجارتی باغ اور انگور کے باغ کی پانی کی حالت کی تغیر کا اندازہ لگانے کے لیے ہائی ریزولوشن UAV تھرمل امیجری کے استعمال کی تحقیقات کی۔
ملٹی اسپیکٹرل امیجنگ روایتی آر جی بی (ریڈ، گرین اور بلیو) امیجز (Ad˜ ao et al.، 2017؛ Navia et al.، 2016) کے مقابلے میں بڑے پیمانے پر ڈیٹا فراہم کر سکتی ہے۔ یہ سپیکٹرل ڈیٹا، مقامی ڈیٹا کے ساتھ، درجہ بندی، نقشہ سازی، پیشین گوئی، پیشن گوئی، اور پتہ لگانے کے مقاصد میں مدد کر سکتا ہے (Berni et al.، 2009b)۔ Candiago et al کے مطابق. (2015)، UAV پر مبنی ملٹی اسپیکٹرل امیجنگ ایک قابل اعتماد اور موثر وسائل کے طور پر فصلوں کی تشخیص اور درست زراعت میں بڑے پیمانے پر حصہ ڈال سکتی ہے۔ اس کے علاوہ،
خلیق وغیرہ۔ (2019) نے سیٹلائٹ اور UAV پر مبنی ملٹی اسپیکٹرل امیجنگ کے درمیان موازنہ کیا۔ UAV پر مبنی تصاویر کے نتیجے میں انگور کے باغ کی تغیرات کو بیان کرنے کے ساتھ ساتھ فصل کی چھتوں کی نمائندگی کرنے کے لیے جوش کے نقشے بھی زیادہ درست تھے۔ مختصراً، اس کلسٹر کے مضامین زرعی UAVs میں تھرمل اور ملٹی اسپیکٹرل امیجنگ سینسرز کو شامل کرنے پر بحث کرتے ہیں۔ اس کے مطابق، یہ سمجھنے کے لیے مزید تحقیق کی ضرورت ہے کہ تھرمل اور ملٹی اسپیکٹرل امیجنگ کو AI کے ساتھ کیسے مربوط کیا جا سکتا ہے۔
پودوں کے تناؤ کا پتہ لگانے کے لیے تکنیک (مثال کے طور پر، گہری سیکھنے) اس طرح کی بصیرتیں زیادہ موثر اور درست پتہ لگانے کے ساتھ ساتھ پودوں کی نشوونما، تناؤ اور فینولوجی کی نگرانی کو یقینی بنانے میں مدد کریں گی (Buters et al., 2020; Cao et al., 2019; Neupane & BaysalGurel, 2021; L. Zhou et al., 2017)۔
کلسٹر 4۔ یہ کلسٹر سات کاغذات پر مشتمل ہے جو زرعی طریقوں کی حمایت میں سپیکٹرل امیجنگ اور ہائپر اسپیکٹرل امیجنگ کے اہم کردار کے گرد گھومتے ہیں۔ ہائپر اسپیکٹرل امیجنگ نے اپنے آپ کو ایک ریموٹ سینسنگ طریقہ کے طور پر قائم کیا ہے جو زمین کے نظام کی مقداری تشخیص کو قابل بناتا ہے (Schaepman et al. سطح کے اجزاء کے تناسب کی تفویض
مخلوط پکسلز کے اندر (Kirsch et al.، 2018؛ Zhao et al.، 2022)۔ دوسرے لفظوں میں، ہائپر اسپیکٹرل سسٹمز کے ذریعہ فراہم کردہ اعلی اسپیکٹرل ریزولوشن مختلف پیرامیٹرز کے زیادہ درست تخمینے کے قابل بناتا ہے، جیسے سبزی خور خصوصیات یا پتوں کے پانی کا مواد (Suomalainen et al., 2014)۔ اس کلسٹر میں محققین نے اس طرح کے نظام کے مختلف پہلوؤں کی چھان بین کی۔ دوسروں کے درمیان، Aasen et al. (2015b) نے ہلکے وزن سے تین جہتی ہائپر اسپیکٹرل معلومات حاصل کرنے کے لیے ایک انوکھا طریقہ پیش کیا۔
اسنیپ شاٹ کیمرے UAVs پر پودوں کی نگرانی کے لیے استعمال ہوتے ہیں۔ Lucieer et al. (2014) نے ایک ناول ہائپر اسپیکٹرل UAS کے ڈیزائن، ترقی، اور فضائی کارروائیوں کے ساتھ ساتھ اس کے ساتھ جمع کردہ تصویری ڈیٹا کی انشانکن، تجزیہ، اور تشریح پر تبادلہ خیال کیا۔ آخر میں، Honkavaara et al. (2013b) نے FabryPerot انٹرفیرومیٹر پر مبنی سپیکٹرل امیجز کے لیے ایک جامع پروسیسنگ اپروچ تیار کیا اور درست زراعت کے لیے بائیو ماس تخمینہ کے طریقہ کار میں اس کا استعمال دکھایا۔ اس موجودہ کلسٹر کے ممکنہ مستقبل کے راستوں میں سینسر ٹیکنالوجیز (Aasen et al., 2015b) میں تکنیکی بہتری کی ضرورت پر زور دینے کے ساتھ ساتھ تکمیلی ٹیکنالوجیز، خاص طور پر بڑے ڈیٹا اور تجزیات کو شامل کرنے اور بڑھانے کی ضرورت پر زور دینا شامل ہے (Ang & Seng, 2021; Radoglou2020; - گرامیٹکس وغیرہ، 2019؛ شکور وغیرہ، 2020)۔ مؤخر الذکر بنیادی طور پر سمارٹ ایگریکلچر میں لاگو کیے گئے مختلف سینسرز کے ذریعہ تیار کردہ مسلسل بڑھتے ہوئے ڈیٹا سے ہوتا ہے (C. Li & Niu, 2022; A. Rejeb et al., 2021; Y. Su & Wang, XNUMX)۔
کلسٹر 5۔ اس کلسٹر کی اشاعتوں نے ڈرون پر مبنی تھری ڈی میپنگ ایپلی کیشنز کی جانچ کی۔ 3D میپنگ کے لیے ڈرون کا استعمال پیچیدہ فیلڈ ورک کو کم کر سکتا ہے اور کارکردگی میں خاطر خواہ اضافہ کر سکتا ہے (Torres-Sanchez ´ et al.، 3)۔ کلسٹر کے پانچ مضامین بنیادی طور پر پلانٹ مانیٹرنگ ایپلی کیشنز پر مرکوز تھے۔ مثال کے طور پر، چھتری کے علاقے، درخت کی اونچائی، اور تاج کے حجم کے بارے میں تین جہتی ڈیٹا حاصل کرنے کے لیے، Torres-Sanchez ´ et al. (2015) نے ڈیجیٹل سطح کے ماڈل بنانے کے لیے UAV ٹیکنالوجی کا استعمال کیا اور پھر آبجیکٹ پر مبنی تصویری تجزیہ (OBIA) اپروچ کیا۔ مزید، Zarco-Tejada et al. (2015) UAV ٹیکنالوجی اور سہ جہتی تصویر کی تعمیر نو کے طریقوں کو یکجا کر کے درخت کی اونچائی کو درست کر دیا۔ جیمینیز-برینس لوپیز-گریناڈوس، ڈی کاسٹرو، وغیرہ۔ (2014) نے UAV ٹیکنالوجی کو جدید OBIA طریقہ کار کے ساتھ مربوط کرکے درجنوں زیتون کے درختوں کی کثیر وقتی، 2017D نگرانی کے لیے ایک نئے عمل کا مظاہرہ کیا۔ اس کلسٹر میں مستقبل کے کاموں کے لیے دلچسپ راستے یا تو موجودہ کو بہتر بنانا شامل ہیں۔
طریقہ کار (Zarco-Tejada et al., 2014) ڈیجیٹل سطح کے ماڈلنگ کے مقاصد کے لیے (Ajayi et al., 2017; Jaud et al., 2016)، جیسے OBIA (de Castro et al., 2018, 2020; Ventura et al. ، 2018)، اور تصویر کی تعمیر نو یا ترقی پذیر ناول کے طریقے (Díaz-Varela et al.، 2015؛ Torres-S´ anchez et al.، 2015)۔
کلسٹر 6۔ یہ کلسٹر زرعی نگرانی میں ڈرون کے کردار پر بحث کرتا ہے۔ UAVs سیٹلائٹ اور ہوائی جہاز کی امیجنگ کی خامیوں کی تکمیل اور ان پر قابو پا سکتے ہیں۔ مثال کے طور پر، وہ کم ایندھن یا پائلٹنگ چیلنجوں کے ساتھ ریئل ٹائم امیجنگ کے قریب اعلی ریزولیوشن فراہم کر سکتے ہیں، جس کے نتیجے میں مستقل اور حقیقی وقت کی نگرانی اور فیصلہ سازی میں بہتری آتی ہے (S. Herwitz et al., 2004)۔ UAVs کی ایک اور اہم شراکت درست زراعت یا سائٹ کے مخصوص فارمنگ کے لیے ان کی اعلی ریزولیوشن کے طور پر سائٹ سے متعلق ڈیٹا فراہم کرنے کی صلاحیت ہے، مختلف پیرامیٹرز کے بارے میں تفصیلی ڈیٹا کسانوں کو زمین کو یکساں حصوں میں تقسیم کرنے اور اس کے مطابق سلوک کرنے کے قابل بناتا ہے (ہنٹ ایٹ ال۔ ، 2010؛ CC Lelong et al.، 2008؛ Primicerio et al.، 2012)۔ اس طرح کی UAV پر مبنی زرعی نگرانی خوراک کی حفاظت کی نگرانی اور فیصلہ سازی میں مدد دے سکتی ہے (SR Herwitz et al., 2004)۔ زرعی نگرانی میں تحقیق کو آگے بڑھانے کے لیے، نہ صرف سینسرز، UAVs، اور دیگر متعلقہ ٹیکنالوجیز اور ان کے مواصلات اور ڈیٹا کی منتقلی کے طریقوں میں بہتری کی ضرورت ہے (Ewing et al., 2020; Shuai et al., 2019)، بلکہ ڈرونز کو مختلف قسم کے ساتھ مربوط کرنے کی بھی ضرورت ہے۔ سمارٹ ایگریکلچر کے سلسلے میں مختلف کاموں کو بہتر بنانے کے لیے ٹیکنالوجیز، جیسے کہ نگرانی، زرعی نگرانی، اور فیصلہ سازی، ایک اعلیٰ ممکنہ تحقیقی علاقہ ہے (Alsamhi et al., 2021; Popescu et al., 2020; Vuran et al., 2018)۔ اس سلسلے میں، IoT، WSNs، اور بڑا ڈیٹا دلچسپ تکمیلی صلاحیتیں پیش کرتے ہیں (van der Merwe et al., 2020)۔ نفاذ کے اخراجات، لاگت کی بچت، توانائی کی کارکردگی، اور ڈیٹا کی حفاظت اس طرح کے انضمام کے لیے زیرِ تحقیق علاقوں میں شامل ہیں (مسرور وغیرہ، 2021)۔
ممالک اور تعلیمی ادارے
آخری مرحلے میں اصل ملک کی تحقیقات اور مصنفین کی علمی وابستگی شامل تھی۔ اس تجزیے کے ذریعے، ہمارا مقصد اسکالرز کی جغرافیائی تقسیم کو بہتر طور پر سمجھنا ہے جو زراعت میں ڈرون کے استعمال میں تعاون کرتے ہیں۔ ممالک اور تعلیمی اداروں کے تنوع کو دیکھنا قابل ذکر ہے۔ ملک کے نقطہ نظر سے، امریکہ، چین، ہندوستان، اور اٹلی اشاعتوں کی تعداد کے لحاظ سے فہرست میں سب سے اوپر ہیں (ٹیبل 7)۔ موجودہ
زرعی ڈرون پر تحقیق زیادہ تر شمالی امریکہ اور ایشیائی ممالک میں مرکوز ہے، جس کی بنیادی وجہ زراعت کے درست استعمال میں ان کی زیادہ مصروفیت ہے۔ مثال کے طور پر، USA میں، 841.9 میں زرعی ڈرونز کی مارکیٹ کا تخمینہ 2020 ملین USD لگایا گیا تھا، جو کہ عالمی مارکیٹ شیئر کا تقریباً 30% ہے (ReportLinker، 2021)۔ دنیا کی سب سے بڑی معیشت کے طور پر درجہ بندی کرتے ہوئے، چین کے سال 2.6 میں 2027 بلین امریکی ڈالر کی تخمینی مارکیٹ سائز تک پہنچنے کی پیش گوئی کی گئی ہے۔ یہ ملک پیداواری مسائل پر قابو پانے اور بہتر پیداوار، مزدوری کی تخفیف، اور کم پیداواری آدانوں کے حصول کے لیے زرعی ڈرونز کی اپیل کر رہا ہے۔ تاہم، چین میں ٹیکنالوجی کو اپنانا آبادی کے سائز اور فصلوں کے انتظام کے موجودہ طریقوں کو اختراع کرنے اور بہتر بنانے کی ضرورت جیسے عوامل سے بھی کارفرما ہے۔
سرفہرست سب سے زیادہ پیداواری ممالک اور یونیورسٹیاں/تنظیمیں جو تعاون کرتی ہیں۔
زرعی ڈرون سے متعلق تحقیق۔
| درجہ بندی | ڈاک |
| 1 | امریکا |
| 2 | چین |
| 3 | بھارت |
| 4 | اٹلی |
| 5 | سپین |
| 6 | جرمنی |
| 7 | برازیل |
| 8 | آسٹریلیا |
| 9 | جاپان |
| 10 | متحدہ سلطنت یونائیٹڈ کنگڈم |
| درجہ بندی | یونیورسٹیاں/تنظیمیں۔ |
| 1 | سائنسز کے چینی اکیڈمی |
| 2 | عوامی جمہوریہ چین کی وزارت زراعت |
| 3 | سائنسی تحقیقات کی اعلی کونسل |
| 4 | ٹیکساس اینڈ ایم یونیورسٹی |
| 5 | چین زرعی یونیورسٹی |
| 6 | یو ایس ڈی اے زرعی تحقیقاتی خدمت |
| 7 | CSIC - انسٹی ٹیوٹ ڈی ایگریکلچر سوسٹینیبل IAS |
| 8 | پرڈیو یونیورسٹی |
| 9 | کونسیگلیو نازیانیل ڈیلی رچرے۔ |
| 10 | جنوبی چین زرعی یونیورسٹی |
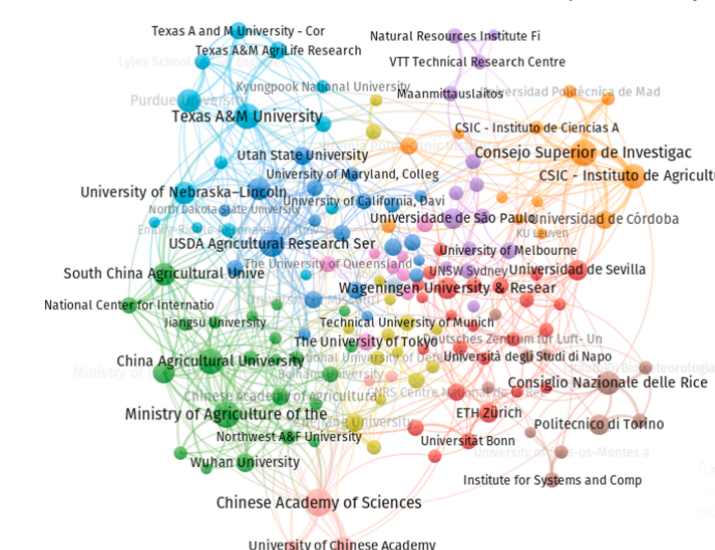
یونیورسٹی اور تنظیمی نقطہ نظر سے، چینی اکیڈمی آف سائنسز اشاعتوں کی تعداد کے لحاظ سے فہرست میں سرفہرست ہے، اس کے بعد عوامی جمہوریہ چین کی وزارت زراعت اور Consejo Superior de Investigaciones Científicas ہیں۔ چینی اکیڈمی آف سائنسز کی نمائندگی مصنفین لیاو ژاؤہان اور لی جون کر رہے ہیں۔ ہان وینٹنگ عوامی جمہوریہ چین کی وزارت زراعت کی نمائندگی کرتے ہیں۔ اور Consejo Superior de Investigaciones Científicas کی نمائندگی Lopez-Granados، ´F. اور Pena، ˜ Jos´e María S. USA سے کرتے ہیں، ٹیکساس A&M یونیورسٹی اور پرڈیو یونیورسٹی جیسی یونیورسٹیاں
ذکر سب سے زیادہ اشاعتوں والی یونیورسٹیاں اور ان کے کنکشن تصویر 4 میں دکھائے گئے ہیں۔ مزید برآں، اس فہرست میں Consiglio Nazionale delle Ricerche اور Consejo Superior de Investigaciones Científicas جیسے ادارے شامل ہیں جو سائنسی تحقیق میں سرگرم ہیں، لیکن تعلیمی ادارے نہیں ہیں۔ .
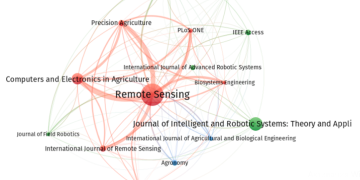
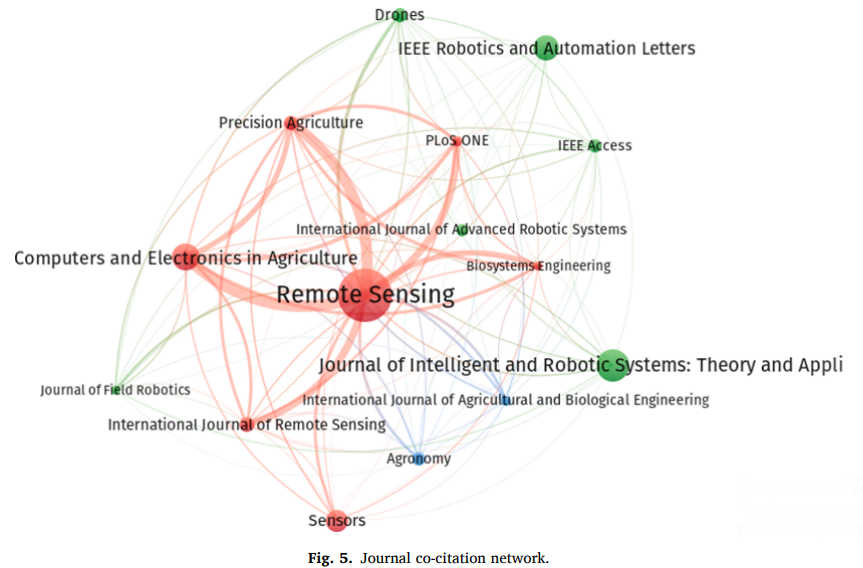
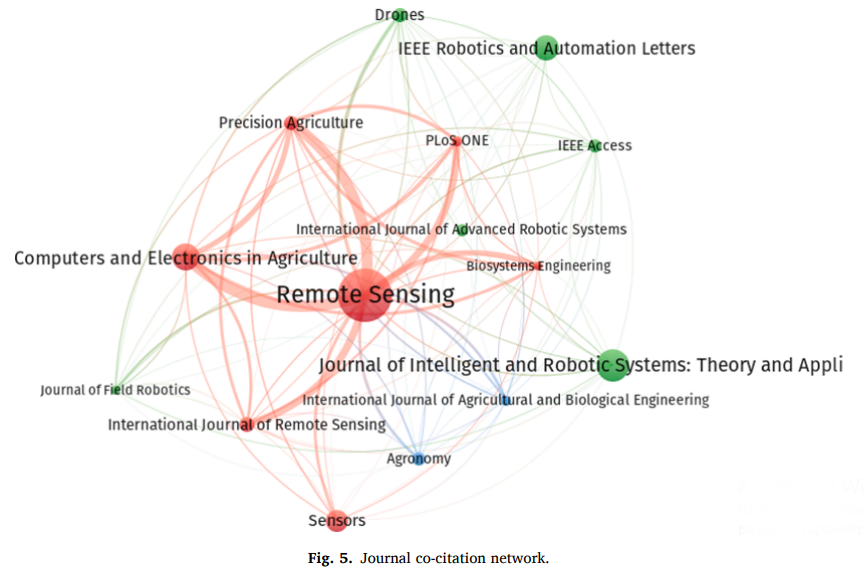
ہمارے انتخاب میں جرائد کی وسیع اقسام شامل ہیں، جس میں تقریباً تمام دستیاب ڈیٹا شامل ہیں۔ جیسا کہ جدول 8 میں دکھایا گیا ہے، ریموٹ سینسنگ 258 مضامین کے ساتھ سرفہرست ہے، اس کے بعد جرنل آف انٹیلیجنٹ اینڈ روبوٹک سسٹمز: تھیوری اور ایپلی کیشنز 126 کے ساتھ اور کمپیوٹرز اینڈ الیکٹرانکس ان ایگریکلچر 98 مضامین کے ساتھ ہیں۔ جبکہ ریموٹ سینسنگ زیادہ تر ڈرونز کے اطلاق اور ترقی پر مرکوز ہے، زراعت میں کمپیوٹرز اور الیکٹرانکس بنیادی طور پر کمپیوٹر ہارڈویئر، سافٹ ویئر، الیکٹرانکس، اور زراعت میں کنٹرول سسٹم میں پیشرفت کا احاطہ کرتا ہے۔ کراس ایریا آؤٹ لیٹس، جیسے کہ 87 اشاعتوں کے ساتھ IEEE روبوٹکس اور آٹومیشن لیٹرز اور 34 اشاعتوں کے ساتھ IEEE رسائی، بھی اس میدان میں نمایاں آؤٹ لیٹس ہیں۔ سرفہرست پندرہ دکانوں نے 959 دستاویزات کے ساتھ ادب میں حصہ ڈالا ہے، جو کہ تمام اشاعتوں کا تقریباً 20.40% ہے۔ جریدے کے ساتھ حوالہ جات کا تجزیہ ہمیں اشاعتوں کے درمیان اہمیت اور مماثلت کا جائزہ لینے کے قابل بناتا ہے۔ مشترکہ اقتباس کے تجزیے سے تین کلسٹر نکلتے ہیں، جیسا کہ تصویر 5 میں دکھایا گیا ہے۔ سرخ کلسٹر جرائد پر مشتمل ہوتا ہے جیسے کہ ریموٹ سینسنگ، کمپیوٹر اور الیکٹرانکس ان ایگریکلچر، سینسرز،
اور انٹرنیشنل جرنل آف ریموٹ سینسنگ۔ یہ تمام آؤٹ لیٹس ریموٹ سینسنگ اور درست زراعت کے شعبوں میں انتہائی معتبر جرائد ہیں۔ گرین کلسٹر میں ایسے روزنامے ہوتے ہیں جو روبوٹکس سے متعلق ہوتے ہیں، جیسے جرنل آف انٹیلیجنٹ اینڈ روبوٹک سسٹمز: تھیوری اینڈ ایپلی کیشنز، آئی ای ای ای روبوٹکس اینڈ آٹومیشن لیٹرز، آئی ای ای ای رسائی، اور ڈرون۔ یہ آؤٹ لیٹس زیادہ تر آٹومیشن پر پیپرز شائع کرتے ہیں اور زرعی انجینئرز کے لیے مفید ہیں۔ حتمی کلسٹر ایگرونومی اور ایگریکلچرل انجینئرنگ سے متعلق جرائد کے ذریعے تشکیل دیا گیا ہے، جیسے ایگرونومی اور انٹرنیشنل جرنل آف ایگریکلچرل اینڈ بائیولوجیکل انجینئرنگ۔
زرعی ڈرون سے متعلق تحقیق میں سرفہرست 15 جرائد۔
| درجہ بندی | جرنل | شمار |
| 1 | ریموٹ سینسنگ | 258 |
| 2 | انٹیلجنٹ اینڈ روبوٹک سسٹمز کا جرنل: تھیوری اور درخواستیں | 126 |
| 3 | زراعت میں کمپیوٹر اور الیکٹرانکس | 98 |
| 4 | IEEE روبوٹکس اور آٹومیشن لیٹرز | 87 |
| 5 | سینسر | 73 |
| 6 | ریموٹ سینسنگ کا بین الاقوامی جریدہ | 42 |
| 7 | صحت سے متعلق زراعت | 41 |
| 8 | ڈرون | 40 |
| 9 | Agronomy | 34 |
| 10 | IEEE رسائی | 34 |
| 11 | انٹرنیشنل جرنل آف ایڈوانسڈ روبوٹک سسٹمز | 31 |
| 12 | زرعی اور حیاتیاتی انجینئرنگ کا بین الاقوامی جریدہ | 25 |
| 13 | 我的老闆是個... | 25 |
| 14 | جرنل آف فیلڈ روبوٹکس | 23 |
| 15 | حیاتیات انجینئرنگ | 23 |
نتیجہ
خلاصہ
اس مطالعے میں، ہم نے زرعی ڈرون پر موجودہ تحقیق کا خلاصہ اور تجزیہ کیا۔ مختلف bibliometric تکنیکوں کا اطلاق کرتے ہوئے، ہم نے زرعی ڈرون سے متعلق تحقیق کے فکری ڈھانچے کی بہتر تفہیم حاصل کرنے کی کوشش کی۔ خلاصہ یہ کہ ہمارا جائزہ لٹریچر میں کلیدی الفاظ کی شناخت اور ان پر بحث کرکے، علمی کلسٹرز کو ظاہر کرتے ہوئے ڈرون کے میدان میں معنوی طور پر ایک جیسی کمیونٹیز کی تشکیل، پہلے کی تحقیق کا خاکہ پیش کرتے ہوئے، اور مستقبل کی تحقیقی سمتوں کی تجویز پیش کرتا ہے۔ ذیل میں، ہم زرعی ڈرون کی ترقی پر جائزے کے اہم نتائج کا خاکہ پیش کرتے ہیں:
• مجموعی ادب نے پچھلی دہائی میں تیزی سے ترقی کی ہے اور بہت زیادہ توجہ مبذول کی ہے، جیسا کہ 2012 کے بعد مضامین کی تعداد میں اضافے سے ظاہر ہوتا ہے۔ حالانکہ یہ علمی شعبہ ابھی اپنی پوری پختگی کو حاصل نہیں کر سکا ہے (Barrientos et al.، 2011؛ Maes اور سٹیپ، 2019)، کئی سوالات ابھی تک جواب طلب نہیں ہیں۔ مثال کے طور پر، انڈور فارمنگ میں ڈرون کی افادیت اب بھی بحث کے لیے کھلی ہے (Aslan et al., 2022; Krul et al., 2021; Rold' an et al., 2015)۔ کھیتوں کے مناظر کی پیچیدگی اور امیجنگ کے مختلف حالات (مثلاً، سائے اور روشنی) کے نتیجے میں اعلی درجے کے اسپیکٹرل میں فرق ہو سکتا ہے (Yao et al.، 2019)۔ یہاں تک کہ بعد کے تحقیقی مراحل میں بھی، محققین کو چیلنج کیا گیا ہے کہ وہ مخصوص منظرناموں اور مطلوبہ تصویری معیار کے مطابق پرواز کے بہترین منصوبوں کا تعین کریں (Soares et al., 2021; Tu et al.,
2020).
• ہم نے دیکھا کہ فیلڈ نے موثر UAV سسٹمز تیار کرنے سے لے کر AI تکنیکوں کو شامل کرنے تک ترقی کی ہے، جیسے کہ مشین لرننگ اور زرعی ڈرونز کے ڈیزائن میں گہری تعلیم (Bah et al., 2018; Kitano et al., 2019; Maimaitijiang et al. , 2020؛ Mazzia et al., 2020; Tetila et al., 2020)۔
• زرعی ڈرون پر تحقیق میں بنیادی طور پر ماحولیاتی نگرانی، فصلوں کے انتظام، اور جڑی بوٹیوں کے انتظام (کلسٹر 1) کے ساتھ ساتھ ریموٹ فینوٹائپنگ اور پیداوار کا تخمینہ (کلسٹر 2) میں ٹیکنالوجی کی صلاحیتوں کو تلاش کر کے ریموٹ سینسنگ پر بحث ہوتی ہے۔ زرعی ڈرون کے بارے میں بااثر مطالعات کے ایک سیٹ میں Austin (2010)، Berni et al. (2009)a، Herwitz et al. (2004)، Nex and Remondino (2014)، اور Zhang and Kovacs (2012)۔ ان مطالعات نے زراعت کے تناظر میں ڈرون سے متعلق تحقیق کی تصوراتی بنیاد تیار کی۔
• طریقہ کار سے متعلق، ہم نے مشاہدہ کیا کہ اب تک کی گئی زیادہ تر تحقیق یا تو سسٹم ڈیزائن، تصوراتی، یا جائزہ پر مبنی مطالعات پر مشتمل تھی (Inoue, 2020; Nex & Remondino, 2014; P'erez-Ortiz et al. 2015؛ Yao et al.، 2019)۔ ہم زرعی ڈرون کی تحقیقات میں تجرباتی، کوالٹیٹو، اور کیس اسٹڈی پر مبنی طریقوں کی کمی کو بھی دیکھتے ہیں۔
• حال ہی میں، صحت سے متعلق زراعت، AI تکنیک، صحت سے متعلق وٹیکچر، اور پانی کے تناؤ کی تشخیص سے متعلق موضوعات نے کافی توجہ مبذول کی ہے (Espinoza et al., 2017; Gomez-Cand ´ on ´ et al., 2016؛ Matese et al. Matese & Di Gennaro, 2015, 2018; Z. Zhou et al., 2021)۔ دو الگ الگ دوروں، 2021–1990 اور 2010–2011 میں تحقیقی کلسٹرز کا بغور جائزہ، ڈومین کے فکری ڈھانچے کی ترقی کو ظاہر کرتا ہے۔ 2021 سے 1990 تک کی مدت نے مرکزی تصورات اور ڈرون کے تصورات کی تشکیل کی، جو UAV ڈیزائن، ترقی، اور نفاذ کی بحث سے واضح ہے۔ دوسرے دور میں، تحقیق کا فوکس پہلے کے مطالعے پر ہوتا ہے، جس سے زراعت میں UAV کے استعمال کے معاملات کی ترکیب کی کوشش ہوتی ہے۔ ہمیں متعدد مطالعات بھی ملی ہیں جن میں امیجنگ کے کاموں اور صحت سے متعلق زراعت میں ڈرون ایپلی کیشنز پر تبادلہ خیال کیا گیا ہے۔
| درجہ بندی | جرنل | شمار |
| 1 | ریموٹ سینسنگ | 258 |
| 2 | انٹیلجنٹ اینڈ روبوٹک سسٹمز کا جرنل: تھیوری اور | 126 |
| درخواستیں | ||
| 3 | زراعت میں کمپیوٹر اور الیکٹرانکس | 98 |
| 4 | IEEE روبوٹکس اور آٹومیشن لیٹرز | 87 |
| 5 | سینسر | 73 |
| 6 | ریموٹ سینسنگ کا بین الاقوامی جریدہ | 42 |
| 7 | صحت سے متعلق زراعت | 41 |
| 8 | ڈرون | 40 |
| 9 | Agronomy | 34 |
| 10 | IEEE رسائی | 34 |
| 11 | انٹرنیشنل جرنل آف ایڈوانسڈ روبوٹک سسٹمز | 31 |
| 12 | زرعی اور حیاتیاتی انجینئرنگ کا بین الاقوامی جریدہ | 25 |
| 13 | 我的老闆是個... | 25 |
| 14 | جرنل آف فیلڈ روبوٹکس | 23 |
| 15 | حیاتیات انجینئرنگ | 22 |
مضمرات
ہمارا بائیبلومیٹرک جائزہ اسکالرز، کسانوں، زرعی ماہرین، فصلوں کے مشیروں، اور UAV سسٹم کے ڈیزائنرز کو ذہن میں رکھتے ہوئے ڈیزائن اور کیا گیا تھا۔ مصنفین کے بہترین علم کے مطابق، یہ ان اولین اصل جائزوں میں سے ایک ہے جس نے اس کا گہرائی سے بائبلی میٹرک تجزیہ کیا ہے۔
زراعت میں ڈرون ایپلی کیشنز ہم نے اس علمی ادارے کا ایک جامع جائزہ لیا ہے، جس میں اشاعتوں کے حوالہ جات اور اقتباسات کے تجزیوں کو استعمال کیا گیا ہے۔ ڈرون ریسرچ کے فکری ڈھانچے کو بیان کرنے کی ہماری کوششیں ماہرین تعلیم کے لیے نئی بصیرتیں بھی پیش کرتی ہیں۔ وقت کے ساتھ استعمال ہونے والے مطلوبہ الفاظ کا محتاط جائزہ ڈرون سے متعلق لٹریچر میں ہاٹ سپاٹ اور فوکل ریسرچ کے شعبوں کو ظاہر کرتا ہے۔ مزید برآں، ہم میدان میں مکمل ہونے والے سب سے زیادہ اثر انگیز تحقیقی کاموں کی نشاندہی کرنے کے لیے سب سے زیادہ حوالہ شدہ مطالعات کی فہرست پیش کرتے ہیں۔ مضامین اور مطلوبہ الفاظ کی شناخت نتیجتاً مستقبل کے مطالعے کے لیے کئی راہیں کھولنے کے لیے ایک ٹھوس نقطہ آغاز فراہم کر سکتی ہے۔
اہم بات یہ ہے کہ ہم نے ایسے کلسٹرز کا انکشاف کیا جو تقابلی کاموں کی درجہ بندی کرتے ہیں اور نتائج کی وضاحت کرتے ہیں۔ کلسٹرز میں درجہ بندی شدہ مطالعات UAV تحقیق کے فکری ڈھانچے کو سمجھنے میں معاون ہیں۔ خاص طور پر، ہم نے ایسے مطالعات کی کمی کو دریافت کیا جو ڈرون کو اپنانے کے عوامل کی تحقیقات کرتے ہیں۔
اور کاشتکاری کی سرگرمیوں میں رکاوٹیں (ٹیبل 9 دیکھیں)۔ مستقبل کے محققین تجرباتی تحقیقات کر کے اس ممکنہ خلا کو دور کر سکتے ہیں جو کاشتکاری کی مختلف سرگرمیوں اور موسمی حالات میں ڈرون کو اپنانے کے عوامل کا جائزہ لیتے ہیں۔ مزید برآں، ڈرون کی افادیت کے حوالے سے کیس اسٹڈی پر مبنی تحقیق کو فیلڈ کے حقیقی ڈیٹا کے ساتھ حمایت حاصل ہونی چاہیے۔ نیز، علمی تحقیق میں کسانوں اور مینیجرز کو شامل کرنا ڈرون تحقیق کی نظریاتی اور عملی ترقی دونوں کے لیے فائدہ مند ہوگا۔ ہم سب سے ممتاز محققین اور ان کے تعاون کی نشاندہی کرنے میں بھی کامیاب رہے، جو قابل قدر ہے کیونکہ حالیہ بنیادی کاموں کے بارے میں آگاہی مستقبل کی تعلیمی کوششوں کے لیے کچھ رہنمائی فراہم کر سکتی ہے۔
ٹیبل 9
UAV گود لینے میں رکاوٹیں۔
| رکاوٹ | Description |
| ڈیٹا سیکورٹی | سائبر سیکورٹی کو لاگو کرنے کے لئے ایک بڑا چیلنج ہے IoT حل (مسرور وغیرہ، 2021)۔ |
| انٹرآپریبلٹی اور انضمام | مختلف ٹیکنالوجیز جیسے UAV، WSN، IoT، وغیرہ۔ مربوط اور ڈیٹا منتقل کیا جانا چاہئے جو پیچیدگی کی سطح میں اضافہ (Alsamhi et al., 2021; Popescu et al., 2020; Vuran et al.، 2018)۔ |
| نفاذ کے اخراجات | یہ خاص طور پر چھوٹے کسانوں کے لیے اور ان کے لیے ہے۔ مختلف جدید ٹیکنالوجیز کو مربوط کرنا ( مسرور وغیرہ، 2021)۔ |
| محنت کا علم اور مہارت | UAVs کو چلانے کے لیے ہنر مند ڈرون پائلٹس کی ضرورت ہے۔ اس کے علاوہ، مختلف جدید کو لاگو کرنا ٹیکنالوجیز کو ہنر مند کارکنوں کی ضرورت ہوتی ہے (YB Huang وغیرہ، 2013؛ Tsouros et al.، 2019)۔ |
| انجن کی طاقت اور پرواز مدت | ڈرونز کو لمبے گھنٹے اور ڈھکنے تک نہیں چلایا جا سکتا بڑے علاقے (Hardin & Hardin, 2010; Laliberte et al., 2007). |
| استحکام، وشوسنییتا، اور تدبیر | خراب موسمی حالات میں ڈرون مستحکم نہیں ہوتے (Hardin & Hardin، 2010؛ Laliberte et al.، 2007)۔ |
| پے لوڈ کی حدود اور سینسر کا معیار | ڈرون صرف محدود بوجھ لے جا سکتے ہیں۔ کم معیار کے سینسر لوڈ کرنے کی صلاحیت (Nebiker ET al. ، 2008)۔ |
| ریگولیشن | جیسا کہ ڈرون خطرناک بھی ہو سکتے ہیں، اس میں شدید بھی ہیں۔ کچھ علاقوں میں ضوابط (Hardin & Jensen, 2011; لالبرٹے اور رنگو، 2011)۔ |
| کسانوں کا علم اور دلچسپی | دیگر جدید ٹیکنالوجی کی طرح ڈرونز کامیاب نفاذ کو مہارت کی ضرورت ہے اور یہ بھی غیر یقینی صورتحال کے ساتھ (Fisher et al.، 2009; لیمبرٹ وغیرہ، 2004؛ اسٹافورڈ، 2000)۔ |
چونکہ پیداوار کو زیادہ سے زیادہ کرنے کے لیے دستیاب وسائل کو مؤثر طریقے سے استعمال کرنے کی مسلسل ضرورت ہے، اس لیے کسان اپنے کھیتوں کی تیز رفتار، درست اور کم لاگت سے سکیننگ کو یقینی بنانے کے لیے ڈرون کا فائدہ اٹھا سکتے ہیں۔ یہ ٹیکنالوجی کسانوں کو ان کی فصلوں کی حالت کا تعین کرنے اور پانی کی حالت، پکنے کے مرحلے، کیڑوں کے انفیکشن اور غذائی ضروریات کا اندازہ لگانے میں مدد دے سکتی ہے۔ ڈرون کی ریموٹ سینسنگ صلاحیتیں کسانوں کو ابتدائی مرحلے میں مسائل کا اندازہ لگانے اور فوری طور پر مناسب مداخلت کرنے کے لیے اہم ڈیٹا فراہم کر سکتی ہیں۔ تاہم، ٹیکنالوجی کے فوائد صرف اسی صورت میں حاصل کیے جاسکتے ہیں جب چیلنجز کا صحیح طریقے سے مقابلہ کیا جائے۔ کی روشنی میں
ڈیٹا سیکیورٹی، سینسر ٹیکنالوجی کے مسائل (مثلاً، پیمائش کی قابل اعتماد یا درستگی)، انضمام کی پیچیدگی، اور لاگو کرنے کے کافی اخراجات کے حوالے سے موجودہ مسائل، مستقبل کے مطالعے کو زرعی ڈرون اور دیگر کٹنگ کے انضمام کی تکنیکی، اقتصادی، اور آپریشنل فزیبلٹی کا بھی جائزہ لینا چاہیے۔ کنارے ٹیکنالوجیز.
حدود
ہمارے مطالعہ کی کئی حدود ہیں۔ سب سے پہلے، نتائج کا تعین حتمی تجزیہ کے لیے منتخب کردہ اشاعتوں کے ذریعے کیا جاتا ہے۔ زرعی ڈرون سے متعلق تمام متعلقہ مطالعات کو حاصل کرنا مشکل ہے، خاص طور پر وہ جو اسکوپس ڈیٹا بیس میں درج نہیں ہیں۔ مزید، ڈیٹا اکٹھا کرنے کا عمل تلاش کے مطلوبہ الفاظ کی ترتیب تک محدود ہے، جو کہ شامل نہیں ہو سکتا اور غیر حتمی نتائج کا باعث بنتا ہے۔ اس طرح، مستقبل کے مطالعے کو ڈیٹا اکٹھا کرنے کے بنیادی مسئلے پر زیادہ توجہ دینے کی ضرورت ہے۔
زیادہ قابل اعتماد نتائج. ایک اور حد نئی اشاعتوں سے متعلق ہے جس میں حوالہ جات کی کم تعداد ہے۔ bibliometric تجزیہ سابقہ اشاعتوں کی طرف متعصب ہے کیونکہ وہ سالوں میں زیادہ حوالہ جات وصول کرتے ہیں۔ حالیہ مطالعات کو توجہ مبذول کرنے اور حوالہ جات جمع کرنے کے لیے ایک خاص وقت درکار ہوتا ہے۔ نتیجتاً، حالیہ مطالعات جو پیراڈائم شفٹ لاتے ہیں ٹاپ ٹین بااثر کاموں میں درجہ بندی نہیں کریں گے۔ یہ حد تیزی سے ابھرتے ہوئے ریسرچ ڈومینز جیسے زرعی ڈرونز کے امتحان میں موجود ہے۔ جیسا کہ ہم نے اس کام کے لٹریچر کا مطالعہ کرنے کے لیے اسکوپس سے مشورہ کیا ہے، مستقبل کے محققین مختلف پر غور کر سکتے ہیں۔
ڈیٹا بیس، جیسے ویب آف سائنس اور IEEE ایکسپلور، افق کو وسعت دینے اور تحقیقی ڈھانچے کو بڑھانے کے لیے۔
ممکنہ بائبلومیٹرک مطالعہ ناول کی بصیرت پیدا کرنے کے لیے دیگر اہم علمی ذرائع جیسے کانفرنس پیپرز، ابواب اور کتابوں پر غور کر سکتا ہے۔ زرعی ڈرون پر عالمی اشاعتوں کی نقشہ سازی اور تحقیقات کے باوجود، ہمارے نتائج نے یونیورسٹیوں کے علمی نتائج کے پیچھے وجوہات کو ظاہر نہیں کیا۔ اس سے تحقیق کے ایک نئے شعبے کی راہ ہموار ہوتی ہے جس میں یہ وضاحت کی جاتی ہے کہ جب زرعی تحقیق کی بات آتی ہے تو کچھ یونیورسٹیاں دوسروں کے مقابلے میں زیادہ پیداواری کیوں ہوتی ہیں۔
ڈرون مزید برآں، مستقبل کے مطالعے ڈرونز کی صلاحیت کے بارے میں بصیرت فراہم کر سکتے ہیں جس سے کئی طریقوں سے کاشتکاری کی پائیداری کو بڑھایا جا سکتا ہے جیسے کہ ماحولیاتی نگرانی، فصل کا انتظام، اور جڑی بوٹیوں کی نقشہ سازی جیسا کہ متعدد محققین نے اشارہ کیا ہے۔ Popescu et al., 2019; J. Su, Liu, et al., 2021b)۔ چونکہ متنی تجزیہ منتخب مقالوں کی زیادہ تعداد کی وجہ سے ممکن نہیں تھا، لہٰذا منظم لٹریچر کے جائزوں کی ضرورت ہے جو
استعمال شدہ تحقیقی طریقے اور سابقہ مطالعات میں کسانوں کی شمولیت۔ مختصر یہ کہ ڈرون ریسرچ کا ہمارا تجزیہ اس علمی ادارے کے پوشیدہ روابط کو بے نقاب کرتا ہے۔ اس لیے یہ جائزہ اشاعتوں کے درمیان تعلقات کو اجاگر کرنے میں مدد کرتا ہے اور تحقیقی میدان کے فکری ڈھانچے کو دریافت کرتا ہے۔ یہ ادب کے مختلف پہلوؤں، جیسے مصنفین کے کلیدی الفاظ، وابستگیوں اور ممالک کے درمیان روابط کو بھی ظاہر کرتا ہے۔
مسابقتی دلچسپی کا اعلان
مصنفین نے اعلان کیا ہے کہ ان کے پاس کوئی مقابلہ مقابلہ مالی مفادات یا ذاتی تعلقات نہیں ہیں جو اس مقالے میں درج کام پر اثر انداز ہوتے دکھائی دے سکتے ہیں۔
اپینڈکس 1
TITLE-ABS-KEY (((ڈرون* یا "بغیر پائلٹ فضائی گاڑی" یا uav* یا "بغیر پائلٹ ہوائی جہاز کا نظام"یا us یا "دور سے پائلٹ ہوائی جہاز”) اور (زرعی یا زراعت یا کاشتکاری یا کسان))) اور (خارج کریں (PUBYEAR، 2022)) اور (LIMIT-TO (زبان، "انگریزی"))۔
حوالہ جات
Aasen, H., Burkart, A., Bolten, A., Bareth, G., 2015. پودوں کی نگرانی کے لیے ہلکے وزن والے UAV سنیپ شاٹ کیمروں کے ساتھ 3D ہائپر اسپیکٹرل معلومات تیار کرنا: سے
کوالٹی اشورینس کے لیے کیمرہ انشانکن۔ آئی ایس پی آر ایس جے فوٹوگرام۔ ریموٹ سینس 108، 245–259۔ https://doi.org/10.1016/j.isprsjprs.2015.08.002۔
عبد الرحمٰن، اے.، پرلسٹائن، ایل.، پرسیوال، ایف.، 2005۔ بغیر پائلٹ کے فضائی گاڑیوں کی تصویروں سے خودکار پرندوں کی شناخت کے لیے پیٹرن کی شناخت کے الگورتھم کی ترقی۔
سروے۔ لینڈ انفارمیشن۔ سائنس 65 (1)، 37–45۔
عبد اللہ، اے.،رجیب، کے.،رجیب، اے، مصطفی، ایم ایم، زیلانی، ایس، 2021۔ زراعت میں وائرلیس سینسر نیٹ ورکس: کتابیات کے تجزیہ سے بصیرت۔ پائیداری 13 (21)،
12011.
Aboutalebi, M., Torres-Rua, AF, Kustas, WP, Nieto, H., Coopmans, C., McKee, M., ہائی ریزولوشن آپٹیکل امیجری میں سائے کا پتہ لگانے کے مختلف طریقوں کا اندازہ اور حساب پر سائے کے اثرات کا اندازہ NDVI، اور بخارات کی منتقلی. آبپاشی۔ سائنس 37 (3)، 407–429۔ https://doi.org/10.1007/s00271-018-0613-9۔
Adao, ˜ T., Hruˇska, J., Padua, ´ L., Bessa, J., Peres, E., Morais, R., Sousa, JJ, 2017. Hyperspectral امیجنگ: UAV-based sensors, data پر ایک جائزہ پروسیسنگ اور
زراعت اور جنگلات کے لیے درخواستیں ریموٹ سینسنگ 9 (11)۔ https://doi.org/ 10.3390/rs9111110۔
Agüera Vega, F., Ramírez, FC, Saiz, MP, Rosúa, FO, 2015. سورج مکھی کی فصل کی نگرانی کے لیے بغیر پائلٹ کے فضائی گاڑی کا استعمال کرتے ہوئے کثیر وقتی امیجنگ۔ بایو سسٹم۔ انج.
132, 19–27. https://doi.org/10.1016/j.biosystemseng.2015.01.008.
Ajayi, OG, Salubi, AA, Angbas, AF, Odigure, MG, 2017. UAV سے درست ڈیجیٹل ایلیویشن ماڈلز کی جنریشن نے کم فیصد اوور لیپنگ امیجز حاصل کیں۔ انٹر
J. ریموٹ سینس 38 (8–10)، 3113–3134۔ https://doi.org/10.1080/ 01431161.2017.1285085۔
Ali, I., Greifeneder, F., Stamenkovic, J., Neumann, M., Notarnicola, C., 2015. ریموٹ سینسنگ ڈیٹا سے بائیو ماس اور مٹی میں نمی کی بازیافت کے لیے مشین لرننگ کے طریقوں کا جائزہ۔ ریموٹ سینسنگ 7 (12)، 16398–16421۔
Alsamhi, SH, Afghah, F., Sahal, R., Hawbani, A., Al Qaness, MAA, Lee, B., Guizani, M., B5G نیٹ ورکس میں UAVs کا استعمال کرتے ہوئے چیزوں کا گرین انٹرنیٹ: ایپلی کیشنز کا جائزہ
اور حکمت عملی. اشتہار ہاک نیٹو۔ 117، 102505 https://doi.org/10.1016/j۔ adhoc.2021.102505.
الثانی، این.، البوینین، اے.، النعیمی، ایف.، زوربا، این.، 2020۔ بھیڑوں کے مویشیوں کی نگرانی کے لیے ڈرون۔ میں: 20 ویں IEEE بحیرہ روم الیکٹرو ٹیکنیکل کانفرنس۔ https://doi.
org/10.1109/MELECON48756.2020.9140588۔
Ampatzidis, Y., Partel, V., 2019. ملٹی اسپیکٹرل امیجنگ اور مصنوعی ذہانت کا استعمال کرتے ہوئے لیموں میں UAV پر مبنی ہائی تھرو پٹ فینوٹائپنگ۔ ریموٹ سینسنگ 11 (4), https://doi.org/10.3390/rs11040410۔
Ampatzidis, Y., Partel, V., Costa, L., 2020. Agroview: مصنوعی ذہانت کا استعمال کرتے ہوئے درست زراعت کی ایپلی کیشنز کے لیے UAV کے جمع کردہ ڈیٹا پر کارروائی، تجزیہ اور تصور کرنے کے لیے کلاؤڈ پر مبنی ایپلی کیشن۔ کمپیوٹنگ الیکٹران۔ زرعی۔ 174، 105457 https://doi. org/10.1016/j.compag.2020.105457۔
Ang, K.-L.-M., Seng, JKP, 2021. زراعت میں ہائپر اسپیکٹرل معلومات کے ساتھ بڑا ڈیٹا اور مشین لرننگ۔ IEEE رسائی 9, 36699–36718۔ https://doi.org/10.1109/
رسائی۔2021.3051196۔
Aquilani, C., Confessore, A., Bozzi, R., Sirtori, F., Pugliese, C., 2022. جائزہ: چراگاہ پر مبنی مویشیوں کے نظام میں صحت سے متعلق لائیو سٹاک فارمنگ ٹیکنالوجیز۔ جانور 16 (1)، https://doi.org/10.1016/j.animal.2021.100429۔
Armenta-Medina, D., Ramirez-Delreal, TA, Villanueva-Vasquez, ´D., Mejia-Aguirre, C., جدید معلومات اور مواصلاتی ٹیکنالوجیز کے رجحانات
زرعی پیداوار کو بہتر بنانا: ایک کتابیات کا تجزیہ۔ زرعی علم 10 (12)، آرٹیکل 12۔ https://doi.org/10.3390/agronomy10121989۔
آرمسٹرانگ، آئی.، پیرون-بروس، ایم.، سمتھ، اے، جدود، ایم، 2011۔ فلائنگ گیٹر: اوکیم-π میں فضائی روبوٹکس کی طرف۔ کمیون پروسیس آرکیٹیکٹ۔ 2011، 329–340۔ https://doi. org/10.3233/978-1-60750-774-1-329۔
اروڑا، SD، چکرورتی، A.، 2021۔ صارفین کی شکایت کرنے والے رویے کی فکری ساخت (CCB) تحقیق: ایک کتابیات کا تجزیہ۔ J. بزنس ریس 122، 60-74۔
Aslan, MF, Durdu, A., Sabanci, K., Ropelewska, E., Gültekin, SS, 2022.
کھلے میدانوں اور گرین ہاؤسز میں صحت سے متعلق زراعت کے لیے UAV کے ساتھ حالیہ مطالعات کا ایک جامع سروے۔ اپل سائنس 12 (3)، 1047۔ https://doi.org/10.3390/
app12031047۔
Atkinson, JA, Jackson, RJ, Bentley, AR, Ober, E., & Wells, DM (2018)۔ مستقبل کے لیے فیلڈ فینوٹائپنگ۔ آن لائن پلانٹ کے سالانہ جائزوں میں (pp. 719–736)۔ جان
Wiley & Sons, Ltd. doi: 10.1002/9781119312994.apr0651۔
آسٹن، آر.، 2010. بغیر پائلٹ کے ہوائی جہاز کے نظام: UAVS ڈیزائن، ترقی اور تعیناتی۔ میں: بغیر پائلٹ ہوائی جہاز کے نظام: UAVS ڈیزائن، ترقی اور
تعیناتی. جان ولی اینڈ سنز۔ https://doi.org/10.1002/9780470664797۔
اویس، ایم، لی، ڈبلیو، چیمہ، ایم جے ایم، زمان، کیو، شاہین، اے، اسلم، بی، زو، ڈبلیو، اجمل، ایم، فہیم، ایم، حسین، ایس، ندیم، AA, Afzal, MM, Liu, C., 2022. UAV بیسڈ ریموٹ سینسنگ ان پلانٹ سٹریس ڈیجیٹل ایگریکلچر کے طریقوں کے لیے ہائی ریزولوشن تھرمل سینسر کے استعمال کا تصور کریں: ایک میٹا ریویو۔ انٹر J. ماحولیات سائنس ٹیکنالوجی. https://doi.
org/10.1007/s13762-021-03801-5.
Bacco, M., Berton, A., Ferro, E., Gennaro, C., Gotta, A., Matteoli, S., Paonessa, F., Ruggeri, M., Virone, G., Zanella, A., 2018. سمارٹ فارمنگ: مواقع، چیلنجز
اور ٹیکنالوجی کے قابل بنانے والے۔ 2018 IoT عمودی اور. زراعت پر ٹاپیکل سمٹ -Tuscany (IOT Tuscany) 1–6۔ https://doi.org/10.1109/IOTTUSCANY.2018.8373043۔
Bah, MD, Hafiane, A., Canals, R., 2018. UAV امیجز میں لائن فصلوں میں گھاس کا پتہ لگانے کے لیے غیر زیر نگرانی ڈیٹا لیبلنگ کے ساتھ گہری تعلیم۔ ریموٹ سینسنگ 10 (11)، 1690۔
https://doi.org/10.3390/rs10111690.
بالڈی، ایس.، 1998. حوالہ جات کی تقسیم میں معیاری بمقابلہ سماجی تعمیراتی عمل: ایک نیٹ ورک تجزیاتی ماڈل۔ ایم۔ سماجی Rev. 63 (6)، 829–846۔ https://doi.
org / 10.2307 / 2657504۔
بلوجا، جے.، ڈیاگو، ایم پی، بلڈا، پی.، زورر، آر، میگیو، ایف.، مورالس، ایف، ٹارڈاگویلا، جے، 2012۔ تھرمل اور ملٹی اسپیکٹرل کے ذریعہ انگور کے باغ کے پانی کی حالت کی تغیر کا اندازہ
بغیر پائلٹ کے فضائی گاڑی (UAV) کا استعمال کرتے ہوئے منظر کشی کرنا۔ آبپاشی۔ سائنس 30 (6)، 511–522۔ https://doi.org/10.1007/s00271-012-0382-9۔
Barabaschi, D., Tondelli, A., Desiderio, F., Volante, A., Vaccino, P., Val`e, G., Cattivelli, L., اگلی نسل کی افزائش۔ پلانٹ سائنس 242، 3–13۔ https://doi.org/10.1016/j
plantsci.2015.07.010.
Barbedo, JGA, Koenigkan, LV, 2018. مویشیوں کی نگرانی کے لیے بغیر پائلٹ کے فضائی نظام کے استعمال پر تناظر۔ آؤٹ لک ایگرک۔ 47 (3)، 214–222۔ https://doi.org/10.1177/0030727018781876۔
Bareth, G., Aasen, H., Bendig, J., Gnyp, ML, Bolten, A., Jung, A., Michels, R., Soukkamaki, ¨ J., 2015. کم وزن اور UAV پر مبنی ہائپر اسپیکٹرل مکمل فریم کیمرے
فصلوں کی نگرانی کے لیے: پورٹیبل سپیکٹرو ریڈیومیٹر پیمائش کے ساتھ سپیکٹرل موازنہ۔ Photogrammetrie, Fernerkundung, Geoinformation 2015 (1), 69-79.
https://doi.org/10.1127/pfg/2015/0256.
Barrientos, A., Colorado, J., del Cerro, J., Martinez, A., Rossi, C., Sanz, D., Valente, J., Aerial Remote Sensing in Agriculture: A practical approach to area coverage
اور چھوٹے فضائی روبوٹ کے بیڑے کے لیے راستے کی منصوبہ بندی۔ J. فیلڈ روب 28 (5)، 667–689۔ https://doi.org/10.1002/rob.20403۔
بصیری، اے.، ماریانی، وی.، سیلانو، جی.، عاطف، ایم.، ایانیلی، ایل.، گلیلمو، ایل.، 2022. درستگی میں ملٹی روٹر UAVs کے لیے پاتھ پلاننگ الگورتھم کے اطلاق پر ایک سروے
زراعت جے نیویگ 75 (2)، 364–383۔
باسنیٹ، بی، بینگ، جے، 2018۔ جدید ترین علم پر مبنی زراعت: اپلائیڈ سینسنگ سسٹمز اور ڈیٹا اینالیٹکس پر ایک جائزہ۔ جے سینس 2018، 1-13۔
Bendig, J., Bolten, A., Bareth, G., 2013. UAV پر مبنی امیجنگ برائے کثیر وقتی، بہت ہی اعلی ریزولیوشن فصل کی سطح کے ماڈلز تاکہ فصل کی نشوونما کے تغیرات کو مانیٹر کیا جا سکے۔ Photogrammetrie, Fernerkundung, Geoinformation 2013 (6), 551–562. https://doi. org/10.1127/1432-8364/2013/0200۔
Bendig, J., Bolten, A., Bennertz, S., Broscheit, J., Eichfuss, S., Bareth, G., 2014. UAVbased RGB امیجنگ سے اخذ کردہ کراپ سطح کے ماڈلز (CSMs) کا استعمال کرتے ہوئے جو کے بائیو ماس کا تخمینہ لگانا۔ ریموٹ سینسنگ 6 (11)، 10395–10412۔
Bendig, J., Yu, K., Aasen, H., Bolten, A., Bennertz, S., Broscheit, J., Gnyp, ML, Bareth, G., 2015. فصل کی سطح سے UAV پر مبنی پودوں کی اونچائی کو یکجا کرنا ماڈلز
جو میں بایوماس کی نگرانی کے لیے مرئی، اور قریب اورکت پودوں کے اشارے۔ انٹر J. Appl ارتھ اوبس۔ جیو انف۔ 39، 79–87۔ https://doi.org/10.1016/j.jag.2015.02.012
Berni, JA, Zarco-Tejada, PJ, Sepulcre-Canto, ´ G., Fereres, E., Villalobos, F., 2009a. ہائی ریزولوشن کا استعمال کرتے ہوئے زیتون کے باغات میں کینوپی کنڈکنس اور CWSI کی نقشہ سازی کرنا
تھرمل ریموٹ سینسنگ امیجری۔ ریموٹ سینس۔ ماحول۔ 113 (11)، 2380–2388۔ https://doi.org/10.1016/j.rse.2009.06.018۔
Berni, JA, Zarco-Tejada, PJ, Suarez, ´ L., Fereres, E., 2009b. بغیر پائلٹ کے ہوائی گاڑی سے پودوں کی نگرانی کے لیے تھرمل اور تنگ بینڈ ملٹی اسپیکٹرل ریموٹ سینسنگ۔ آئی ای ای ای ٹرانس۔ Geosci. ریموٹ سینس 47 (3)، 722–738۔
Bouzembrak, Y., Klüche, M., Gavai, A., Marvin, HJP, 2019. انٹرنیٹ آف تھنگز ان فوڈ سیفٹی: لٹریچر ریویو اور ایک کتابیات کا تجزیہ۔ رجحانات فوڈ سائنس. ٹیکنالوجی. 94,54–64۔ https://doi.org/10.1016/j.tifs.2019.11.002۔
Brewster, C., Roussaki, I., Kalatzis, N., Doolin, K., Ellis, K., 2017. زراعت میں IoT: یورپ بھر میں بڑے پیمانے پر پائلٹ ڈیزائن کرنا۔ IEEE کمیون۔ میگ 55 (9)، 26–33۔
Buters, TM, Belton, D., Cross, AT, 2019. ملٹی سینسر UAV سے باخبر رہنے والی انفرادی پودوں اور سیڈلنگ کمیونٹیز کی ملی میٹر درستگی پر۔ ڈرون 3 (4)، 81۔
https://doi.org/10.3390/drones3040081.
Candiago, S., Remondino, F., De Giglio, M., Dubbini, M., Gattelli, M., 2015. UAV امیجز سے پریزین فارمنگ ایپلی کیشنز کے لیے ملٹی اسپیکٹرل امیجز اور پودوں کے اشاریے کا جائزہ لینا۔ ریموٹ سینسنگ 7 (4)، 4026–4047۔ https://doi.org/10.3390/rs70404026۔
Cao, Y., Li, GL, Luo, YK, Pan, Q., Zhang, SY, 2020. UAV سے اخذ کردہ وسیع ڈائنامک رینج ویجیٹیٹیشن انڈیکس (WDRVI) کا استعمال کرتے ہوئے شوگر بیٹ کی نمو کے اشارے کی نگرانی
ملٹی اسپیکٹرل تصاویر کمپیوٹنگ الیکٹران۔ زرعی۔ 171، 105331 https://doi.org/10.1016/j.compag.2020.105331۔
Casillas, J., Acedo, F., 2007. Evolution of intellectual structure of family business literary: a bibliometric study of FBR. خاندانی کاروبار Rev. 20 (2)، 141–162۔
Cen, H., Wan, L., Zhu, J., Li, Y., Li, X., Zhu, Y., Weng, H., Wu, W., Yin, W., Xu, C. Bao, Y., Feng, L., Shou, J., He, Y., 2019. کے تحت چاول کے بایوماس کی متحرک نگرانی
دوہری امیج فریم سنیپ شاٹ کیمروں کے ساتھ ہلکے وزن والے UAV کا استعمال کرتے ہوئے مختلف نائٹروجن علاج۔ پودوں کے طریقے 15 (1)، 32. https://doi.org/10.1186/s13007-019-
0418 8 ہے.
Chamuah, A., Singh, R., 2019. شہری UAV کے ذریعے ہندوستانی زراعت میں پائیداری کو محفوظ بنانا: ایک ذمہ دار اختراعی نقطہ نظر۔ ایس این ایپل۔ سائنس 2 (1)، 106۔ https://
doi.org/10.1007/s42452-019-1901-6.
Chamuah, A., Singh, R., 2022. ہندوستانی فصل انشورنس کی درخواستوں کے لیے سویلین بغیر پائلٹ فضائی گاڑی (UAV) اختراعات کی ذمہ دار حکمرانی۔ J. ذمہ دار
ٹیکنالوجی. 9، 100025 https://doi.org/10.1016/j.jrt.2022.100025۔
Chen, A., Orlov-Levin, V., Meron, M., 2019۔ فصل کی چھتری کی اعلی ریزولیوشن ویزیبل چینل ایریل امیجنگ کو درست آبپاشی کے انتظام میں لاگو کرنا۔ زرعی۔ پانی
منیج۔ 216، 196-205۔ https://doi.org/10.1016/j.agwat.2019.02.017۔
Daakir, M., Pierrot-Deseilligny, M., Bosser, P., Pichard, F., Thom, C., Rabot, Y., Martin, O., 2017. آن بورڈ فوٹوگرامیٹری اور سنگل فریکوئنسی GPS پوزیشننگ کے ساتھ ہلکا پھلکا UAV میٹرولوجی ایپلی کیشنز کے لیے۔ آئی ایس پی آر ایس جے فوٹوگرام۔ ریموٹ سینس 127، 115–126۔ https://doi.org/10.1016/j.isprsjprs.2016.12.007۔
Dawaliby, S., Aberkane, A., Bradai, A., 2020. خود مختار ڈرون آپریشنز کے انتظام کے لیے بلاکچین پر مبنی IoT پلیٹ فارم۔ میں: 2nd ACM کی کارروائی
5G اور اس سے آگے کے لیے ڈرون اسسٹڈ وائرلیس کمیونیکیشنز پر موبی کام ورکشاپ، پی پی 31–36۔ https://doi.org/10.1145/3414045.3415939۔
ڈے، آر اے، گیسٹل، بی، 1998۔ سائنسی مقالہ کیسے لکھنا اور شائع کرنا ہے۔ کیمبرج یونیورسٹی پریس۔ de Castro, AI, Pena, ˜ JM, Torres-Sanchez, ´ J., Jim´enez-Brenes, FM, ValenciaGredilla, F., Recasens, J., Lopez-Granados, ´ F., 2020. Mapping cynodon dactylon infesting خودکار فیصلے کے ساتھ فصلوں کا احاطہ کریں۔ ریموٹ سینسنگ 12 (1)، 56۔ https://doi.org/10.3390/rs12010056۔
de Castro, AI, Torres-S´ anchez, J., Pena, ˜ JM, Jim´enez-Brenes, FM, Csillik, O., Lopez- ´Granados, F., 2018. ایک خودکار بے ترتیب جنگل-OBIA الگورتھم UAV امیجری کا استعمال کرتے ہوئے فصل کی قطاروں کے درمیان اور اندر گھاس کی ابتدائی نقشہ سازی۔ ریموٹ سینسنگ 10 (2)۔ https://doi.org/10.3390/rs10020285۔
Demir, N., Sonmez, ¨ NK, Akar, T., Ünal, S., 2018. UAV امیجری سے اخذ کردہ DSM کا استعمال کرتے ہوئے گندم کے جین ٹائپس کے پودوں کی اونچائی کی خودکار پیمائش۔ کارروائی 2 (7)، 350۔ https://doi.org/10.3390/ecrs-2-05163۔
Deng, J., Zhong, Z., Huang, H., Lan, Y., Han, Y., Zhang, Y., 2020. بغیر پائلٹ کے فضائی گاڑیوں کا استعمال کرتے ہوئے حقیقی وقت میں گھاس کی نقشہ سازی کے لیے ہلکا پھلکا سیمنٹک سیگمنٹیشن نیٹ ورک۔ اپل سائنس 10 (20)، 7132۔ https://doi.org/10.3390/app10207132۔
Deng, L., Mao, Z., Li, X., Hu, Z., Duan, F., Yan, Y., 2018. UAV پر مبنی ملٹی اسپیکٹرل ریموٹ سینسنگ برائے صحت سے متعلق زراعت: مختلف کیمروں کے درمیان موازنہ۔ آئی ایس پی آر ایس جے فوٹوگرام۔ ریموٹ سینس 146، 124–136۔
Diaz-Gonzalez, FA, Vuelvas, J., Correa, CA, Vallejo, VE, Patino, D., 2022. مشین لرننگ اور ریموٹ سینسنگ تکنیکوں کا اطلاق مٹی کے اشارے کا تخمینہ لگانے کے لیے - جائزہ۔ ایکول Ind. 135, 108517 https://doi.org/10.1016/j.ecolind.2021.108517۔
Díaz-Varela, RA, De la Rosa, R., Leon, ´ L., Zarco-Tejada, PJ, 2015. 3D تصویر کا استعمال کرتے ہوئے زیتون کے درخت کے تاج کے پیرامیٹرز کا اندازہ کرنے کے لیے ہائی ریزولوشن ہوا سے چلنے والی UAV تصویر
تعمیر نو: افزائش نسل کی آزمائشوں میں درخواست۔ ریموٹ سینسنگ 7 (4)، 4213–4232۔ https://doi.org/10.3390/rs70404213۔
ڈکشٹ، اے، جاکھڑ، ایس کے، 2021۔ ہوائی اڈے کی صلاحیت کا انتظام: ایک جائزہ اور کتابیات کا تجزیہ۔ جے ایئر ٹرانسپ منیج۔ 91، 102010۔
ڈونگ، ٹی، شانگ، جے، لیو، جے، کیان، بی، جینگ، کیو، ما، بی، ہف مین، ٹی، گینگ، ایکس، سو، اے، شی، وائی، Canisius, F., Jiao, X., Kovacs, JM, Walters, D., Cable, J., Wilson, J., 2019.
اونٹاریو، کینیڈا میں فصل کی نشوونما اور پیداوار کے اندرون فیلڈ تغیرات کی نشاندہی کرنے کے لیے RapidEye امیجری کا استعمال۔ صحت سے متعلق زرعی۔ 20 (6)، 1231–1250۔ https://doi.org/10.1007/
s11119-019-09646-w۔
Dutta, PK, Mitra, S., 2021. CoVID-19 کے بعد کے دوران فوڈ سپلائی چین کو سمجھنے کے لیے زرعی ڈرون اور آئی او ٹی کا اطلاق۔ میں: چودھری، اے، بسواس، اے، پرتیک، ایم،
چکربرتی، اے (ایڈز)، زرعی انفارمیٹکس: آٹومیشن یوزنگ دی آئی او ٹی اور مشین لرننگ۔ ولی، صفحہ 67-87۔ وین ایک، این، والٹ مین، ایل.، 2009۔ سافٹ ویئر سروے: VOSviewer، bibliometric میپنگ کے لیے ایک کمپیوٹر پروگرام۔ سائینٹومیٹرکس 84 (2)، 523–538۔ https://doi.org/10.1007/s11192-009-0146-3۔
ایلیاہ، او، رحمان، ٹی اے، اوریکمہی، آئی، لیو، سی وائی، ہندیا، ایم این، 2018۔ انٹرنیٹ آف تھنگز (IoT) کا ایک جائزہ اور زراعت میں ڈیٹا اینالیٹکس: فوائد اور چیلنجز۔
IEEE انٹرنیٹ چیزیں J. 5 (5), 3758–3773۔
Enciso, J., Avila, CA, Jung, J., Elsayed-Farag, S., Chang, A., Yeom, J., Landivar, J., Maeda, M., Chavez, JC, 2019. زرعی سائنس کی توثیق UAV اور فیلڈ
ٹماٹر کی اقسام کی پیمائش کمپیوٹنگ الیکٹران۔ زرعی۔ 158، 278–283۔ https://doi.org/10.1016/j.compag.2019.02.011۔
Espinoza, CZ, Khot, LR, Sankaran, S., Jacoby, PW, 2017. ہائی ریزولوشن ملٹی اسپیکٹرل اور تھرمل ریموٹ سینسنگ پر مبنی پانی کے تناؤ کی تشخیص
زیر زمین سیراب انگور کی بیلیں ریموٹ سینسنگ 9 (9), 961۔ https://doi.org/ 10.3390/rs9090961۔
Ewing, J., Oommen, T., Jayakumar, P., Alger, R., 2020. مٹی کی درجہ بندی کے لیے ہائپر اسپیکٹرل ریموٹ سینسنگ کا استعمال۔ ریموٹ سینسنگ 12 (20), 3312. ttps://doi.org/10.3390/
آر ایس 12203312۔
Fawcett, D., Panigada, C., Tagliabue, G., Boschetti, M., Celesti, M., Evdokimov, A., Biriukova, K., Colombo, R., Miglietta, F., Rascher, U., اینڈرسن، K.، 2020۔ آپریشنل حالات میں ڈرون پر مبنی ملٹی اسپیکٹرل سطح کی عکاسی اور پودوں کے اشاریہ جات کی کثیر پیمانے پر تشخیص۔ ریموٹ سینسنگ 12 (3)، 514۔
Feng, X., Yan, F., Liu, X., 2019. درست زراعت کے لیے انٹرنیٹ آف تھنگز پر وائرلیس کمیونیکیشن ٹیکنالوجیز کا مطالعہ۔ وائرلیس Pers. کمیون 108 (3)
1785 1802.
فریرا، ایم پی، پنٹو، سی ایف، سیرا، ایف آر، 2014۔ بین الاقوامی کاروباری تحقیق میں لین دین کی لاگت کا نظریہ: تین دہائیوں پر مشتمل ایک کتابیات کا مطالعہ۔ سائنٹومیٹرکس 98 (3)، 1899–1922۔ https://doi.org/10.1007/s11192-013-1172-8۔
فشر، پی.، ابوزر، ایم.، راب، ایم، بیسٹ، ایف، چندرا، ایس، 2009۔ جنوب مشرقی آسٹریلیا میں صحت سے متعلق زراعت میں پیشرفت۔ I. نقل کرنے کے لیے رجعت کا طریقہ کار
کسانوں کی تاریخی پیڈاک پیداوار اور نارملائزڈ فرق ویجیٹیشن انڈیکس کا استعمال کرتے ہوئے اناج کی پیداوار میں مقامی تغیر۔ فصل چراگاہ سائنس 60 (9)، 844–858۔
Floreano, D., Wood, RJ, 2015. سائنس، ٹیکنالوجی اور چھوٹے خود مختار ڈرون کا مستقبل۔ فطرت 521 (7553)، 460–466۔ https://doi.org/10.1038/nature14542۔
Friha, O., Ferrag, MA, Shu, L., Maglaras, LA, Wang, X., 2021. سمارٹ ایگریکلچر کے مستقبل کے لیے چیزوں کا انٹرنیٹ: ابھرتی ہوئی ٹیکنالوجیز کا ایک جامع سروے۔ IEEE CAA J. آٹوم۔ سینیکا 8 (4)، 718–752۔
Fuentes-Pacheco, J., Torres-Olivares, J., Roman-Rangel, E., Cervantes, S., JuarezLopez, P., Hermosillo-Valadez, J., Rendon-Mancha, ´ JM, 2019. Fig plant segmentation گہرے convolutional encoder-decoder نیٹ ورک کا استعمال کرتے ہوئے فضائی تصاویر سے۔ ریموٹ سینسنگ 11 (10)، 1157۔ https://doi.org/10.3390/rs11101157۔
Gago, J., Douthe, C., Coopman, RE, Gallego, PP, Ribas-Carbo, M., Flexas, J., Escalona, J., Medrano, H., 2015. UAVs کے لیے پانی کے دباؤ کا اندازہ کرنے کا چیلنج
پائیدار زراعت. زرعی۔ پانی کا انتظام۔ 153، 9-19۔ https://doi.org/10.1016/j agwat.2015.01.020.
García-Tejero, IF, Rubio, AE, Vinuela, ˜ I., Hern´andez, A., Guti´errez-Gordillo, S., Rodríguez-Pleguezuelo, CR, Dur´an-Zuazo, VH, 2018. تھرمل امیجنگ پلانٹ میں
خسارے کی آبپاشی کی حکمت عملیوں کے تحت بادام کے درختوں (cv. Guara) میں فصل کے پانی کی حالت کا جائزہ لینے کے لیے سطح۔ زرعی۔ پانی کا انتظام۔ 208، 176–186۔ https://doi.org/10.1016/j
agwat.2018.06.002.
Garzonio, R., Di Mauro, B., Colombo, R., Cogliati, S., 2017. ایک چھوٹے سے ہائپر اسپیکٹرل UAS کا استعمال کرتے ہوئے سطح کی عکاسی اور سورج کی حوصلہ افزائی فلوروسینس سپیکٹروسکوپی پیمائش۔ ریموٹ سینسنگ 9 (5), 472۔ https://doi.org/10.3390/rs9050472۔ Gaˇsparovi´c, M., Zrinjski, M., Barkovi´c, Đ., Radoˇcaj, D., 2020. کے لیے ایک خودکار طریقہ
UAV تصویروں کی بنیاد پر جئی کے کھیتوں میں گھاس کا نقشہ بنانا۔ کمپیوٹنگ الیکٹران۔ زرعی۔
گیبرز، آر، ایڈمچک، VI، 2010۔ صحت سے متعلق زراعت اور خوراک کی حفاظت۔ سائنس 327 (5967)، 828–831۔ https://doi.org/10.1126/science.1183899۔
Geipel, J., Link, J., Claupein, W., 2014. بغیر پائلٹ کے ہوائی جہاز کے نظام کے ساتھ حاصل کردہ فضائی تصاویر اور فصل کی سطح کے ماڈلز پر مبنی مکئی کی پیداوار کی مشترکہ سپیکٹرل اور مقامی ماڈلنگ۔ ریموٹ سینسنگ 6 (11)، 10335–10355۔ https://doi.org/10.3390/rs61110335۔
Geng, D., Feng, Y., Zhu, Q., 2020. صارفین کے لیے پائیدار ڈیزائن: ایک ادب کا جائزہ اور کتابیات کا تجزیہ۔ ماحولیات۔ سائنس آلودگی. Res. 27 (24)، 29824–29836۔ https://doi. org/10.1007/s11356-020-09283-1۔
Gevaert, CM, Suomalainen, J., Tang, J., Kooistra, L., 2015. ملٹی اسپیکٹرل سیٹلائٹ اور ہائپر اسپیکٹرل کو ملا کر سپیکٹرل ٹیمپورل رسپانس سطحوں کی تخلیق
صحت سے متعلق زراعت کی ایپلی کیشنز کے لیے UAV امیجری۔ IEEE J. Sel. اوپر۔ اپل ارتھ اوبس۔ ریموٹ سینس 8 (6)، 3140–3146۔ ttps://doi.org/10.1109/JSTARS.2015.2406339۔
Gill, SS, Chana, I., Buyya, R., 2017. IoT پر مبنی زراعت بطور کلاؤڈ اور بڑی ڈیٹا سروس: ڈیجیٹل انڈیا کا آغاز۔ J. تنظیم اور اینڈ یوزر کمپیوٹ۔ (JOEUC) 29 (4)،
1 23.
Gmür, M., 2006. Co-citation analysis and the search for invisible colleges: a methodological evaluation. سائینٹومیٹرکس 57 (1)، 27–57۔ https://doi.org/10.1023/
a:1023619503005۔
Gnadinger, ¨ F., Schmidhalter, U., 2017. بغیر پائلٹ کے فضائی گاڑیاں (UAVs) کے ذریعے مکئی کے پودوں کی ڈیجیٹل گنتی۔ ریموٹ سینسنگ 9 (6)۔ https://doi.org/10.3390/rs9060544۔
Gokto ¨ ǧan, AH, Sukkarieh, S., Bryson, M., Randle, J., Lupton, T., Hung, C., 2010. ایک روٹری ونگ بغیر پائلٹ ہوائی گاڑی آبی گھاس کی نگرانی اور
انتظام جے انٹیل۔ روبوٹک نظام: تھیور۔ اپل 57 (1–4)، 467–484۔ https://doi. org/10.1007/s10846-009-9371-5۔
Gomez-Cand ´ on, ´ D., De Castro, AI, Lopez-Granados, ´ F., 2014. گندم میں درست زراعت کے مقاصد کے لیے بغیر پائلٹ کے فضائی گاڑی (UAV) تصویروں سے موزیک کی درستگی کا اندازہ لگانا۔ عین مطابق زرعی۔ 15 (1)، 44–56۔ https://doi.org/10.1007/s11119-013-9335-4۔
Gomez-Cand ´ on, ´ D., Virlet, N., Labb´e, S., Jolivot, A., Regnard, J.-L., 2016. UAV- حسی تصویر کے ذریعہ درخت کے پیمانے پر پانی کے تناؤ کی فیلڈ فینوٹائپنگ : نئی بصیرت کے لیے
تھرمل حصول اور انشانکن. عین مطابق زرعی۔ 17 (6)، 786–800۔ https://doi.org/10.1007/s11119-016-9449-6۔
Gonzalez-Dugo, V., Zarco-Tejada, PJ, Fereres, E., 2014. لیموں کے باغات میں پانی کی کمی کے اشارے کے طور پر فصل کے پانی کے تناؤ کے اشاریہ کو استعمال کرنے کی قابل اطلاق اور حدود۔ زرعی۔ کے لیے۔ میٹیرول۔ 198–199، 94–104۔ https://doi.org/10.1016/j agrformet.2014.08.003.
Gonzalez-Dugo, V., Zarco-Tejada, P., Nicolas, ´ E., Nortes, PA, Alarcon, ´ JJ, Intrigliolo, DS, Fereres, E., 2013. ہائی ریزولوشن UAV تھرمل امیجری کا استعمال
تجارتی باغ کے اندر پھلوں کے درختوں کی پانچ انواع کے پانی کی حالت میں تغیر کا جائزہ لیں۔ عین مطابق زرعی۔ 14 (6)، 660–678۔ https://doi.org/10.1007/s11119-013-9322-9۔
گوئل، کے، کمار، ایس، 2021۔ مالی خواندگی: ایک منظم جائزہ اور کتابیات کا تجزیہ۔ انٹر J. کنزیومر اسٹڈیز 45 (1)، 80-105۔ https://doi.org/10.1111/
ijcs.12605.
Grenzdorffer, ¨ GJ, Engel, A., Teichert, B., 2008. جنگلات اور زراعت میں کم لاگت کے uavs کی فوٹوگرام میٹرک صلاحیت۔ فوٹوگرامیٹری، ریموٹ سینسنگ اور اسپیشل انفارمیشن سائنسز کے بین الاقوامی آرکائیوز - ISPRS آرکائیوز 37، 1207–1213۔ https://www.scopus.com/inward/record.uri?eid=2-s2.0-85039543258&partnerI D=40&md5=b4b2d639257e8ddb5a373d15959c4e1e۔
Guan, S., Fukami, K., Matsunaka, H., Okami, M., Tanaka, R. Nakano, H., Sakai, T., Nakano, K., Ohdan, H., Takahashi, K., 2019. ہائی ریزولوشن کے ارتباط کا اندازہ لگانا
چھوٹے UAVs کا استعمال کرتے ہوئے کھاد کے استعمال کی سطح اور چاول اور گندم کی فصلوں کی پیداوار کے ساتھ NDVI۔ ریموٹ سینسنگ 11 (2)، 112۔
گنڈولف، کے، فلسر، ایم، 2013. مینجمنٹ ریسرچ اینڈ مذہب: ایک حوالہ تجزیہ۔ J. بس اخلاقیات 112 (1)، 177–185۔
Guo, Q., Zhu, Y., Tang, Y., Hou, C., He, Y., Zhuang, J., Zheng, Y., Luo, S., 2020. CFD تخروپن اور مقامی کی تجرباتی تصدیق اور وقتی تقسیم
ہوور میں کواڈ روٹر ایگریکلچرل UAV کا ڈاون واش ہوا کا بہاؤ۔ کمپیوٹنگ الیکٹران۔ زرعی۔ 172، 105343 https://doi.org/10.1016/j.compag.2020.105343۔
Haghighattalab, A., Gonz' alez P´erez, L., Mondal, S., Singh, D., Schinstock, D., Rutkoski, J., Ortiz-Monasterio, I., Singh, RP, Goodin, D. ، پولینڈ، جے، 2016۔
گندم کی افزائش کی بڑی نرسریوں کی ہائی تھرو پٹ فینوٹائپنگ کے لیے بغیر پائلٹ کے فضائی نظام کا اطلاق۔ پودوں کے طریقے 12 (1)۔ https://doi.org/10.1186/s13007-
016 0134 6.
Hakala, T., Honkavaara, E., Saari, H., Makynen, ¨ J., Kaivosoja, J., Pesonen, L., & Pol ¨ onen, ¨I., 2013. روشنی کے مختلف حالات میں UAVs سے اسپیکٹرل امیجنگ . جی جی بل آر (ایڈ) میں، فوٹوگرامیٹری کے بین الاقوامی آرکائیوز، ریموٹ سینسنگ اور اسپیشل انفارمیشن سائنسز—ISPRS آرکائیوز (جلد 40، شمارہ 1W2، صفحہ 189-194)۔ بین الاقوامی سوسائٹی برائے فوٹوگرامیٹری اور ریموٹ سینسنگ۔ https://www.scopus.com/inward/record.uri?eid=2-s2.0-848875632۔
Hamylton, SM, Morris, RH, Carvalho, RC, Roder, N., Barlow, P., Mills, K., Wang, L. بغیر پائلٹ کے ہوائی جہاز سے جزیرے کی پودوں کی نقشہ سازی کی تکنیک
گاڑی (UAV) امیجز: پکسل کی درجہ بندی، بصری تشریح اور مشین سیکھنے کے طریقے۔ انٹر J. Appl ارتھ اوبس۔ جیو انف۔ 89، 102085 https://doi.org/
10.1016/j.jag.2020.102085
Haque, A., Islam, N., Samrat, NH, Dey, S., Ray, B., 2021. بنگلہ دیش میں ذمہ دار قیادت کے ذریعے سمارٹ فارمنگ: امکانات، مواقع اور اس سے آگے۔
پائیداری 13 (8)، 4511۔
ہارڈن، پی جے، ہارڈن، ٹی جے، 2010۔ ماحولیاتی تحقیق میں چھوٹے پیمانے پر دور سے چلنے والی گاڑیاں۔ جغرافیہ کمپاس 4 (9)، 1297–1311۔ ttps://doi.org/10.1111/j.1749-
8198.2010.00381.x.
ہارڈن، پی جے، جینسن، آر آر، 2011۔ ماحولیاتی ریموٹ سینسنگ میں چھوٹے پیمانے پر بغیر پائلٹ والی فضائی گاڑیاں: چیلنجز اور مواقع۔ GISci ریموٹ سینس 48 (1)، 99–111۔ https://doi.org/10.2747/1548-1603.48.1.99۔
He, Y., Nie, P., Zhang, Q., Liu, F., 2021. ایگریکلچرل انٹرنیٹ آف تھنگز: ٹیکنالوجیز اینڈ ایپلی کیشنز، (پہلا ایڈیشن 1 ایڈیشن)۔ اسپرنگر۔
Herwitz, SR, Johnson, LF, Dunagan, SE, Higgins, RG, Sullivan, DV, Zheng, J., Lobitz, BM, Leung, JG, Gallmeyer, BA, Aoyagi, M., Slye, RE, Brass, JA, 2004.
بغیر پائلٹ ہوائی گاڑی سے امیجنگ: زرعی نگرانی اور فیصلے کی حمایت۔ کمپیوٹنگ الیکٹران۔ زرعی۔ 44 (1)، 49–61۔ https://doi.org/10.1016/j
compag.2004.02.006.
Holman, FH, Riche, AB, Michalski, A., Castle, M., Wooster, MJ, Hawkesford, MJ, UAV پر مبنی ریموٹ سینسنگ کا استعمال کرتے ہوئے فیلڈ پلاٹ ٹرائلز میں گندم کے پودے کی اونچائی اور ترقی کی شرح کی ہائی تھرو پٹ فیلڈ فینوٹائپنگ۔ ریموٹ سینسنگ 8 (12)۔ https://doi. org/10.3390/rs8121031۔
Honkavaara, E., Saari, H., Kaivosoja, J., Pol ¨ onen, ¨ I., Hakala, T., Litkey, P., M¨akynen, J., Pesonen, L., 2013. پروسیسنگ اور تشخیص عین مطابق زراعت کے لیے ہلکے وزن والے UAV سپیکٹرل کیمرہ کا استعمال کرتے ہوئے جمع کردہ سپیکٹرو میٹرک، سٹیریوسکوپک امیجری۔ ریموٹ سینسنگ 5 (10)، 5006–5039۔ https://doi.org/10.3390/rs5105006۔
Hossein Motlagh, N., Taleb, T., Arouk, O., 2016. کم اونچائی والی بغیر پائلٹ کی فضائی گاڑیاں چیزوں کی خدمات پر مبنی انٹرنیٹ: جامع سروے اور مستقبل کے تناظر۔ IEEE انٹرنیٹ چیزیں J. 3 (6), 899–922۔ https://doi.org/10.1109/JIOT.2016.2612119۔
Hrabar, S., Sukhatme, GS, Corke, P., Usher, K., Roberts, J., 2005. مشترکہ آپٹک فلو اور سٹیریو پر مبنی نیویگیشن UAV کے لیے شہری وادیوں کا۔ میں: 2005 IEEE/RSJ
ذہین روبوٹس اور سسٹمز پر بین الاقوامی کانفرنس، پی پی 3309–3316۔ https://doi.org/10.1109/IROS.2005.1544998۔
Hsu, T.-C., Yang, H., Chung, Y.-C., Hsu, C.-H., 2020۔ کلاؤڈ فوگ کمپیوٹنگ کے لیے ایک تخلیقی IoT زراعت کا پلیٹ فارم۔ برقرار رکھنا۔ کمپیوٹنگ Inf. سسٹم 28، 100285۔
ہوانگ، ایچ، ڈینگ، جے، لین، وائی، یانگ، اے، ڈینگ، ایکس، ژانگ، ایل، گونزالیز-انڈوجر، جے ایل، 2018۔ بغیر پائلٹ کے فضائی گاڑی کی ویڈ میپنگ کے لیے ایک مکمل طور پر قابل عمل نیٹ ورک ( UAV) امیجری۔ PLOS ONE 13 (4) e0196302۔
ہوانگ، ایچ.، لین، وائی.، یانگ، اے.، ژانگ، وائی.، وین، ایس.، ڈینگ، جے، 2020۔ گہری تعلیم بمقابلہ آبجیکٹ پر مبنی تصویری تجزیہ (OBIA) UAV امیجری کی ویڈ میپنگ میں۔ انٹر جے۔
ریموٹ سینس 41 (9)، 3446–3479۔ https://doi.org/10.1080/01431161.2019.1706112۔
ہوانگ، ایچ، یانگ، اے، تانگ، وائی، زوانگ، جے، ہو، سی، ٹین، زیڈ، داننجیان، ایس، ہی، وائی، گو، کیو، لو، ایس، 2021. فصل کی نگرانی میں UAV امیجری کے لیے گہرے رنگ کی انشانکن
مقامی سے عالمی توجہ کے ساتھ سیمنٹک اسٹائل ٹرانسفر کا استعمال۔ انٹر J. Appl ارتھ اوبس۔ جیو انف۔ 104، 102590 https://doi.org/10.1016/j.jag.2021.102590۔
Huang, YB, Thomson, SJ, Hoffmann, WC, Lan, YB, Fritz, BK, 2013. زرعی پیداوار کے لیے بغیر پائلٹ کے فضائی گاڑیوں کی ٹیکنالوجی کی ترقی اور امکان
انتظام انٹر جے ایگرک بائول انج. 6 (3)، 1-10۔ https://doi.org/10.3965/j۔ ijabe.20130603.001.
ہوانگ، وائی، ہوفمین، ڈبلیو سی، لین، وائی، وو، ڈبلیو، فرٹز، بی کے، 2009۔ بغیر پائلٹ کے فضائی گاڑی کے پلیٹ فارم کے لیے اسپرے سسٹم کی ترقی۔ اپل انج. زرعی۔ 25 (6)، 803–809۔
Hunt Jr., ER, Dean Hively, W., Fujikawa, SJ, Linden, DS, Daughtry, CST, McCarty, GW, 2010. سے NIR-سبز نیلے ڈیجیٹل تصاویر کا حصول
فصل کی نگرانی کے لیے بغیر پائلٹ کے طیارے۔ ریموٹ سینسنگ 2 (1)، 290–305۔ https://doi. org/10.3390/rs2010290۔ Inoue, Y., 2020. سمارٹ فارمنگ کے لیے فصلوں اور مٹی کی سیٹلائٹ اور ڈرون پر مبنی ریموٹ سینسنگ۔ ایک جائزہ۔ مٹی سائنس پلانٹ نیوٹر 66 (6)، 798–810۔ https://doi.org/10.1080/00380768.2020.1738899۔
Islam, N., Rashid, MM, Pasandideh, F., Ray, B., Moore, S., Kadel, R., 2021. انٹرنیٹ آف تھنگز (IoT) کے لیے ایپلی کیشنز اور کمیونیکیشن ٹیکنالوجیز کا جائزہ اور
بغیر پائلٹ کی فضائی گاڑی (UAV) پر مبنی پائیدار سمارٹ فارمنگ۔ پائیداری 13 (4)، 1821۔ https://doi.org/10.3390/su13041821۔
Jaud, M., Passot, S., Le Bivic, R., Delacourt, C., Grandjean, P., Le Dantec, N., 2016. حساب سے ہائی ریزولوشن ڈیجیٹل سطح کے ماڈلز کی درستگی کا اندازہ
PhotoScan® اور MicMac® ذیلی بہترین سروے کے حالات میں۔ ریموٹ سینسنگ 8 (6)، https://doi.org/10.3390/rs8060465۔
Jim'enez-Brenes, FM, Lopez-Granados, ´ F., Castro, AI, Torres-S´ anchez, J., Serrano, N., Pena, ˜ JM, 2017. زیتون کے درختوں کے فن تعمیر اور سالانہ پر کٹائی کے اثرات کا اندازہ لگانا UAV پر مبنی 3D ماڈلنگ کا استعمال کرتے ہوئے چھتری کی ترقی۔ پودوں کے طریقے 13 (1)۔ https://doi.org/10.1186/s13007-017-0205-3۔
Jin, X., Liu, S., Baret, F., Hemerl´e, M., Comar, A., 2017. بہت کم اونچائی والے UAV امیجری سے نکلنے پر گندم کی فصلوں کے پودوں کی کثافت کا تخمینہ۔ ریموٹ سینس۔
ماحولیات۔ 198، 105-114۔ https://doi.org/10.1016/j.rse.2017.06.007۔
Jinbo, C., Xiangliang, C., Han-Chi, F., Lam, A., 2019. کلاؤڈ کمپیوٹنگ کے ذریعے تعاون یافتہ زرعی مصنوعات کی نگرانی کا نظام۔ کلسٹر کمپیوٹ۔ 22 (4)، 8929–8938۔
Ju, C., & Son, HI 2018a. زراعت میں ریموٹ سینسنگ کے لیے متعدد UAV سسٹمز کی کارکردگی کا جائزہ۔ IEEE انٹرنیشنل کانفرنس آن روبوٹکس اینڈ آٹومیشن (ICRA)، برسبین، آسٹریلیا، 21-26 میں زراعت میں روبوٹک ویژن اور ایکشن پر ورکشاپ کی کارروائی۔
Ju, C., Son, HI, 2018b. زرعی ایپلی کیشنز کے لیے متعدد UAV سسٹمز: کنٹرول، نفاذ، اور تشخیص۔ الیکٹرانکس 7 (9)، 162۔ https://doi.org/10.3390/
الیکٹرانکس7090162۔
جنگ، جے.، مائدہ، ایم.، چانگ، اے، بھنڈاری، ایم.، آشاپورے، اے، لینڈیور-باؤلز، جے.، 2021۔ ریموٹ سینسنگ اور مصنوعی ذہانت کی صلاحیت کو بہتر بنانے کے اوزار کے طور پر
زرعی پیداواری نظام کی لچک کرر رائے۔ بائیو ٹیکنالوجی 70، 15-22۔ https://doi.org/10.1016/j.copbio.2020.09.003۔
Kalischuk, M., Paret, ML, Freeman, JH, Raj, D., Da Silva, S., Eubanks, S., Wiggins, DJ, Lollar, M., Marois, JJ, Mellinger, HC, Das, J. 2019. ایک بہتر کراپ سکاؤٹنگ تکنیک جس میں بغیر پائلٹ کے ہوائی گاڑیوں کی مدد سے ملٹی اسپیکٹرل کراپ امیجنگ کو روایتی اسکاؤٹنگ پریکٹس میں شامل کیا گیا ہے جو تربوز میں چپچپا تنے کی خرابی ہے۔ پلانٹ ڈس 103 (7)، 1642–1650۔
کپور، کے کے، تاملمنی، کے، رانا، این پی، پاٹل، پی، دویدی، وائی کے، نیرور، ایس، 2018۔ سوشل میڈیا ریسرچ میں پیشرفت: ماضی، حال اور مستقبل۔ آگاہ کرنا. سسٹم سامنے والا۔ 20
(3)، 531-558.
Kerkech, M., Hafiane, A., Canals, R., 2020. VddNet: ملٹی اسپیکٹرل امیجز اور ڈیپتھ میپ پر مبنی بیل کی بیماری کا پتہ لگانے کا نیٹ ورک۔ ریموٹ سینسنگ 12 (20)، 3305. https://doi. org/10.3390/rs12203305۔
Khaliq, A., Comba, L., Biglia, A., Ricauda Aimonino, D., Chiaberge, M., Gay, P., 2019. انگور کے باغ کے لیے سیٹلائٹ اور UAV پر مبنی ملٹی اسپیکٹرل امیجری کا موازنہ
تغیر کی تشخیص ریموٹ سینسنگ 11 (4)۔ https://doi.org/10.3390/rs11040436۔
Khan, PW, Byun, Y.-C., Park, N., 2020. IoT-blockchain نے اعلی درجے کی گہری سیکھنے کا استعمال کرتے ہوئے فوڈ انڈسٹری 4.0 کے لیے آپٹمائزڈ پرووینس سسٹم کو فعال کیا۔ سینسر 20 (10)، 2990۔
Khan, RU, Khan, K., Albattah, W., Qamar, AM, Ullah, F., 2021. پودوں کی بیماریوں کی تصویری بنیاد پر پتہ لگانے: کلاسیکی مشین لرننگ سے گہرے سیکھنے کے سفر تک۔ وائرلیس کمیون. موبائل کمپیوٹ۔ 2021، 1-13۔
خان، ایس، طفیل، ایم، خان، ایم ٹی، خان، زیڈ اے، اقبال، جے، عالم، ایم، لی، کے این کیو، 2021۔ UAV پر مبنی فصل/گھاس کی درجہ بندی کے لیے ایک نیا نیم زیر نگرانی فریم ورک۔ PLOS ONE 16 (5) e0251008۔
کھنال، ایس.، فلٹن، جے، شیئرر، ایس، 2017۔ صحت سے متعلق زراعت میں تھرمل ریموٹ سینسنگ کے موجودہ اور ممکنہ استعمال کا جائزہ۔ کمپیوٹنگ الیکٹران۔
زرعی۔ 139، 22–32۔ https://doi.org/10.1016/j.compag.2017.05.001۔
کھنہ، اے، کور، ایس.، 2019۔ انٹرنیٹ آف تھنگز (IoT) کا ارتقاء اور درست زراعت کے شعبے میں اس کا نمایاں اثر۔ کمپیوٹنگ الیکٹران۔ زرعی۔ 157، 218–231۔
Kim, W., Khan, GF, Wood, J., Mahmood, MT, 2016. پائیدار تنظیموں کے لیے ملازمین کی مصروفیت: سوشل نیٹ ورک کے تجزیہ اور برسٹ کا استعمال کرتے ہوئے مطلوبہ الفاظ کا تجزیہ
پتہ لگانے کے نقطہ نظر. پائیداری 8 (7)، 631۔
Kirsch, M., Lorenz, S., Zimmermann, R., Tusa, L., Mockel, ¨ R., Hodl, ¨ P., Booysen, R., Khodadadzadeh, M., Gloaguen, R., 2018. انضمام زمینی اور ڈرون سے پیدا ہونے والے
ایکسپلوریشن میپنگ اور کان کنی کی نگرانی کے لیے ہائپر اسپیکٹرل اور فوٹوگرام میٹرک سینسنگ کے طریقے۔ ریموٹ سینسنگ 10 (9)، 1366۔ https://doi.org/10.3390/
آر ایس 10091366۔
Kitano, BT, Mendes, CCT, Geus, AR, Oliveira, HC, Souza, JR, 2019. گہری سیکھنے اور UAV امیجز کا استعمال کرتے ہوئے مکئی کے پودے کی گنتی۔ IEEE Geosci. ریموٹ سینس۔ Lett. 1–5 https://doi.org/10.1109/LGRS.2019.2930549۔
Koh, JCO, Spangenberg, G., Kant, S., 2021. ہائی تھرو پٹ امیج پر مبنی پلانٹ فینوٹائپنگ کے لیے خودکار مشین لرننگ۔ ریموٹ سینسنگ 13 (5)، 858۔ https://
doi.org/10.3390/rs13050858۔
Kovalev, IV, Voroshilova, AA, 2020. کارگو UAVs کے ماحولیاتی نظام کی ترقی میں جدید تکنیکی رجحانات۔ J. طبیعیات conf. سر 1515 (5)، 052068 https://doi. org/10.1088/1742-6596/1515/5/052068۔
Krul, S., Pantos, C., Frangulea, M., Valente, J., 2021. ایک monocular کیمرے کے ساتھ چھوٹے ڈرون کا استعمال کرتے ہوئے اندرونی مویشیوں اور کاشتکاری کے لیے بصری SLAM: ایک فزیبلٹی اسٹڈی۔
ڈرونز 5 (2)، 41۔ https://doi.org/10.3390/drones5020041۔
Kulbacki, M., Segen, J., Knie´c, W., Klempous, R., Kluwak, K., Nikodem, J., Kulbacka, J., Serester, A., 2018. زرعی آٹومیشن کے لیے ڈرون کا سروے پودے لگانے سے
فصل میں: INES 2018 - IEEE 22 ویں بین الاقوامی کانفرنس آن انٹیلیجنٹ انجینئرنگ سسٹمز، pp. 000353–358۔ https://doi.org/10.1109/INES.2018.8523943۔
Lagkas, T., Argyriou, V., Bibi, S., Sarigiannidis, P., 2018. UAV IoT فریم ورک کے خیالات اور چیلنجز: ڈرونز کو "چیزوں" کے طور پر تحفظ دینے کی طرف۔ سینسر 18 (11), 4015. https://doi.org/10.3390/s18114015۔
Laliberte, AS, Rango, A., 2011. تصویری پروسیسنگ اور درجہ بندی کے طریقہ کار کے تجزیہ کے لیے ذیلی decimeter امیجری جو بغیر پائلٹ کے ہوائی جہاز کے ذریعے حاصل کی گئی ہے
رینج لینڈز GISci ریموٹ سینس 48 (1)، 4–23۔ https://doi.org/10.2747/1548-1603.48.1.4
لالیبرٹ، اے ایس، رنگو، اے، ہیرک، جے ای، 2007۔ رینج لینڈ میپنگ اور مانیٹرنگ کے لیے بغیر پائلٹ کی فضائی گاڑیاں: دو نظاموں کا موازنہ۔ ASPRS سالانہ کانفرنس کی کارروائی۔
Lam, OHY, Dogotari, M., Prüm, M., Vithlani, HN, Roers, C., Melville, B., Zimmer, F., Becker, R., 2021. مقامی گھاس کے میدان میں گھاس کی نقشہ سازی کے لیے ایک اوپن سورس ورک فلو
بغیر پائلٹ کے ہوائی گاڑی کا استعمال: Rumex obtusifolius کو کیس اسٹڈی کے طور پر استعمال کرنا۔ یور J. Remote Sens. 54 (sup1), 71–88. https://doi.org/10.1080/22797254.2020.1793687۔
Lambert, DM, Lowenberg-DeBoer, J., Griffin, TW, Peone, J., Payne, T., Daberkow, SG, 2004. اپنانا، منافع بخش، اور درست فارمنگ ڈیٹا کا بہتر استعمال۔
ورکنگ پیپر۔ پرڈیو یونیورسٹی۔ https://doi.org/10.22004/ag.econ.28615۔
Lelong, CCD, Burger, P., Jubelin, G., Roux, B., Labb'e, S., Baret, F., 2008. چھوٹے پلاٹوں میں گندم کی فصل کی مقداری نگرانی کے لیے بغیر پائلٹ کے فضائی گاڑیوں کی تصویر کا اندازہ۔ سینسر 8 (5), 3557–3585۔ https://doi.org/10.3390/s8053557۔
Li, C., Niu, B., 2020۔ بڑے ڈیٹا اور چیزوں کے انٹرنیٹ پر مبنی سمارٹ ایگریکلچر کا ڈیزائن۔ انٹر J. تقسیم سینس۔ نیٹو۔ 16 (5) ttps://doi.org/10.1177/1550147720917065۔
Li, W., Niu, Z., Chen, H., Li, D., Wu, M., Zhao, W., 2016. ایک سے ہائی ریزولوشن سٹیریو امیجز کا استعمال کرتے ہوئے مکئی کی چھتری کی اونچائی اور اوپر کے زمینی بایوماس کا ریموٹ تخمینہ کم لاگت بغیر پائلٹ کے فضائی گاڑی کا نظام۔ ایکول شمارہ 67، 637-648۔ https://doi.org/10.1016/j.ecolind.2016.03.036۔
Liakos, KG, Busato, P., Moshou, D., Pearson, S., Bochtis, D., 2018. Machine Learning in Agriculture: A Review. سینسر 18 (8)، 2674۔
لیبِش، ایف.، کرچگیسنر، این.، شنائیڈر، ڈی، والٹر، اے.، ہنڈ، اے.، 2015۔ موبائل ملٹی سینسر اپروچ کے ساتھ مکئی کے خصائص کی ریموٹ، فضائی فینوٹائپنگ۔ پودوں کے طریقے 11 (1)، 9. https://doi.org/10.1186/s13007-015-0048-8۔
Lin, Z., Guo, W., 2020. بغیر پائلٹ کے فضائی نظام کی تصاویر اور گہری سیکھنے کا استعمال کرتے ہوئے سورگم پینیکل کا پتہ لگانا اور گنتی کرنا۔ سامنے والا۔ پلانٹ سائنس 11۔
Liu, S., Guo, L., Webb, H., Ya, X., Chang, X., 2019. کلاؤڈ کمپیوٹنگ پر مبنی جدید ماحولیاتی زراعت کا انٹرنیٹ آف تھنگس مانیٹرنگ سسٹم۔ IEEE رسائی 7، 37050–37058۔
Lopez-Granados, ´ F., 2011. سائٹ کے ساتھ مخصوص گھاس کے انتظام کے لیے گھاس کا پتہ لگانا: نقشہ سازی اور حقیقی وقت کے نقطہ نظر۔ ویڈ ریس 51 (1)، 1-11۔ https://doi.org/10.1111/j.1365-3180.2010.00829.x
Lopez-Granados, ´ F., Torres-Sanchez, ´ J., De Castro, A.-I., Serrano-P´erez, A., MesasCarrascosa, F.-J., Pena, ˜ J.-M. , 2016. ہائی ریزولوشن UAV امیجری کا استعمال کرتے ہوئے گھاس کی فصل میں گھاس کے گھاس کی آبجیکٹ پر مبنی ابتدائی نگرانی۔ ایگرون۔ برقرار رکھنا۔ دیو 36 (4)، 1-12
Lopez-Granados, ´F., Torres-S´ anchez, J., Serrano-P´erez, A., de Castro, AI, MesasCarrascosa, F.-J., Pena, ˜ J.-M., 2016. UAV ٹکنالوجی کا استعمال کرتے ہوئے سورج مکھی میں ابتدائی سیزن ویڈ میپنگ: گھاس کی دہلیز کے خلاف جڑی بوٹیوں کے علاج کے نقشوں کی تغیر۔ عین مطابق زرعی۔ 17 (2)، 183–199۔
Lucieer, A., Malenovský, Z., Veness, T., Wallace, L., 2014. HyperUAS – ایک ملٹی روٹر بغیر پائلٹ کے ہوائی جہاز کے نظام سے امیجنگ سپیکٹروسکوپی۔ J. فیلڈ روب 31 (4)،
571-590۔ https://doi.org/10.1002/rob.21508۔
Lumme, J., Karjalainen, M., Kartinen, H., Kukko, A., Hyyppa, ¨ J., Hyypp¨ a, H., Jaakkola, A., & Kleemola, J., 2008. زمینی لیزر اسکیننگ زرعی فصلیں جے جے میں
چن جے ماس ایچ – جی (ایڈ۔)، فوٹوگرامیٹری کے بین الاقوامی آرکائیوز، ریموٹ سینسنگ اینڈ اسپیشل انفارمیشن سائنسز—ISPRS آرکائیوز (جلد 37، صفحہ 563-566)۔
بین الاقوامی سوسائٹی برائے فوٹوگرامیٹری اور ریموٹ سینسنگ۔ https://www.scopus .com/inward/record.uri?eid=2-s2.0-84919356328&partnerID=40&md5=574
b802131a99d16318ce619a01ca1bf.
Ma, L., Li, M., Ma, X., Cheng, L., Du, P., Liu, Y., 2017. زیر نگرانی آبجیکٹ بیسڈ لینڈ کور امیج کی درجہ بندی کا جائزہ۔ آئی ایس پی آر ایس جے فوٹوگرام۔ ریموٹ سینس 130،
277–293۔ https://doi.org/10.1016/j.isprsjprs.2017.06.001۔
Maes, WH, Steppe, K., 2019۔ درست زراعت میں بغیر پائلٹ کے فضائی گاڑیوں کے ساتھ ریموٹ سینسنگ کے تناظر۔ رجحانات پلانٹ سائنس. 24 (2)، 152–164۔ https://doi.org/10.1016/j.tplants.2018.11.007۔
Maimaitijiang, M., Ghulam, A., Sidike, P., Hartling, S., Maimaitiyiming, M., Peterson, K., Shavers, E., Fishman, J., Peterson, J. Kadam, S., برکن، جے، فریٹسچی، ایف، 2017۔
بغیر پائلٹ کے فضائی نظام (UAS) - ملٹی سینسر ڈیٹا فیوژن اور انتہائی سیکھنے والی مشین کا استعمال کرتے ہوئے سویا بین کی فینوٹائپنگ۔ آئی ایس پی آر ایس جے فوٹوگرام۔ ریموٹ سینس 134، 43–58۔ https://doi.org/10.1016/j.isprsjprs.2017.10.011۔ Maimaitijiang, M., Sagan, V., Sidike, P., Daloye, AM, Erkbol, H., Fritschi, FB, 2020۔
سیٹلائٹ/UAV ڈیٹا فیوژن اور مشین لرننگ کا استعمال کرتے ہوئے فصل کی نگرانی۔ ریموٹ سینسنگ 12 (9)، 1357۔ https://doi.org/10.3390/rs12091357۔
Manfreda, S., McCabe, M., Miller, P., Lucas, R., Pajuelo Madrigal, V., Mallinis, G., Ben Dor, E., Helman, D., Estes, L., Ciraolo, G. ., Müllerova, ´ J., Tauro, F., de Lima, M., de
Lima, J., Maltese, A., Frances, F., Caylor, K., Kohv, M., Perks, M., Ruiz-P´erez, G., Su, Z., Vico, G., Toth. ، B.، 2018. کے لیے بغیر پائلٹ کے فضائی نظام کے استعمال پر
ماحولیاتی نگرانی. ریموٹ سینسنگ 10 (4)، 641۔
مارینکو، RA، 1998۔ مقالہ جات، 1989 اور دی سیریلز لائبریرین 35 (1–2)، 29–44 میں خواتین کے مطالعے کے جرائد کے حوالے۔ https://doi.org/10.1300/J123v35n01_
03.
مسرور، آر، نعیم، ایم، اعجاز، ڈبلیو، 2021۔ UAV کی مدد سے وائرلیس نیٹ ورکس میں وسائل کا انتظام: ایک اصلاحی نقطہ نظر۔ ایڈہاک نیٹ ورک۔ 121، 102596 https://doi.org/10.1016/j.adhoc.2021.102596۔
Matese, A., Di Gennaro, SF, 2018. ملٹی اسپیکٹرل، تھرمل اور RGB ہائی ریزولیوشن امیجز پر مبنی ملٹی سینسر UAV پلیٹ فارم کی عملی ایپلی کیشنز
وٹیکچر زراعت 8 (7)، 116۔ https://doi.org/10.3390/agriculture8070116۔
Matese, A., Di Gennaro, SF, 2021۔ روایتی NDVI انڈیکس سے آگے ایک کلیدی عنصر کے طور پر پریزین ویٹیکلچر میں UAV کے استعمال کو مرکزی دھارے میں لانا۔ سائنس نمائندہ 11 (1)، 2721۔ https://doi.org/10.1038/s41598-021-81652-3۔
Matese, A., Toscano, P., Di Gennaro, SF, Genesio, L., Vaccari, FP, Primicerio, J., Belli, C., Zaldei, A., Bianconi, R., Gioli, B., 2015 UAV، ہوائی جہاز کا باہمی موازنہ
اور سیٹلائٹ ریموٹ سینسنگ پلیٹ فارمز پریزین وٹیکلچر کے لیے۔ ریموٹ سینسنگ 7 (3)، 2971–2990۔ https://doi.org/10.3390/rs70302971۔
Mazzia, V., Comba, L., Khaliq, A., Chiaberge, M., Gay, P., 2020. UAV اور مشین لرننگ کی بنیاد پر سیٹلائٹ سے چلنے والے پودوں کے اشاریہ کی درستگی کے لیے
زراعت سینسر 20 (9)، 2530۔ https://doi.org/10.3390/s20092530۔
مکین، کے ڈبلیو، 1990۔ دانشورانہ جگہ میں مصنفین کی نقشہ سازی: ایک تکنیکی جائزہ۔ جے ایم Soc معلومات سائنس 41 (6)، 433–443۔
Meinen, BU, Robinson, DT, 2021. زرعی کٹاؤ ماڈلنگ: UAV ٹائم سیریز ڈیٹا کا استعمال کرتے ہوئے USLE اور WEPP فیلڈ پیمانے پر کٹاؤ کے تخمینے کا جائزہ لینا۔ ماحولیات۔ ماڈل۔ سافٹ ویئر 137، 104962۔ https://doi.org/10.1016/j.envsoft.2021.104962۔
Melville, B., Lucieer, A., Aryal, J., 2019. ہائپر اسپیکٹرل بغیر پائلٹ ایئرکرافٹ سسٹم (UAS) امیجری کا استعمال کرتے ہوئے نشیبی مقامی گھاس کے علاقوں کی کمیونٹیز کی درجہ بندی
تسمانین مڈلینڈز۔ ڈرون 3 (1)، 5۔
میسینا، جی.، موڈیکا، جی.، 2020۔ درست زراعت میں UAV تھرمل امیجری کی ایپلی کیشنز: اسٹیٹ آف دی آرٹ اور مستقبل کا تحقیقی نقطہ نظر۔ ریموٹ سینسنگ 12 (9)، https://doi.org/10.3390/rs12091491۔
مشرا، ڈی، لوو، زیڈ، جیانگ، ایس، پاپاڈوپولوس، ٹی.، دوبے، آر، 2017۔ بڑے ڈیٹا پر ایک کتابیات کا مطالعہ: تصورات، رجحانات اور چیلنجز۔ بزنس پروسیس مینیگ۔ J. 23 (3)،
555 573.
Mochida, K., Saisho, D., Hirayama, T., 2015. کھیتوں کے حالات کے تحت حاصل کردہ لائف سائیکل ڈیٹاسیٹس کا استعمال کرتے ہوئے فصل کی بہتری۔ سامنے والا۔ پلانٹ سائنس 6 https://doi.org/10.3389/
fpls.2015.00740.
موگیلی، یو ایم آر، دیپک، بی بی وی ایل، 2018۔ درست زراعت میں ڈرون سسٹم کے اطلاق کا جائزہ۔ پروسیڈیا کمپیوٹ۔ سائنس 133، 502-509۔
موہرانہ، ایس.، دتہ، ایس.، 2016. ہائپر اسپیکٹرل امیجری سے چاول کے کلوروفل اور نائٹروجن مواد کی مقامی تغیر۔ آئی ایس پی آر ایس جے فوٹوگرام۔ ریموٹ سینس 122، 17-29۔
Muangprathub, J., Boonnam, N., Kajornkasirat, S., Lekbangpong, N., Wanichsombat, A.,
نیلور، پی.، 2019. سمارٹ فارم کے لیے IoT اور زراعت کے ڈیٹا کا تجزیہ۔ کمپیوٹنگ الیکٹران۔ زرعی۔ 156، 467–474۔
نینسن، سی، ایلیٹ، این، 2016۔ ریموٹ سینسنگ اینڈ ریفلیکشن پروفائلنگ ان ٹومولوجی۔ انو Rev. Entomol. 61 (1)، 139–158۔ https://doi.org/10.1146/annurev-ento010715-023834۔
Navia, J., Mondragon, I., Patino, D., Colorado, J., 2016. زراعت میں ملٹی اسپیکٹرل میپنگ: ایک خود مختار کواڈ کوپٹر UAV کا استعمال کرتے ہوئے خطوں کا موزیک۔ انٹر conf.
بغیر پائلٹ ہوائی جہاز کا نظام۔ (ICUAS) 2016، 1351–1358۔ https://doi.org/10.1109/ ICUAS.2016.7502606۔
Nayyar, A., Nguyen, B.-L., Nguyen, NG, 2020. ڈرون چیزوں کا انٹرنیٹ (Iodt): سمارٹ ڈرون کا مستقبل کا تصور۔ Adv. انٹیل۔ سسٹم کمپیوٹنگ 1045، 563–580۔ https://doi.org/10.1007/978-981-15-0029-9_45۔
Nebiker, S., Annen, A., Scherrer, M., Oesch, D., 2008. مائیکرو UAV کے لیے ایک ہلکے وزن کا ملٹی اسپیکٹرل سینسر — بہت زیادہ ریزولیوشن ایئربورن ریموٹ سینسنگ کے مواقع۔ انٹر محراب فوٹوگرام۔ ریموٹ سینس۔ Inf. سائنس 37 (B1)، 1193–1200۔
Negash, L., Kim, H.-Y., Choi, H.-L., 2019. زراعت میں ابھرتی ہوئی UAV ایپلی کیشنز۔ میں: 2019 روبوٹ انٹیلی جنس ٹیکنالوجی پر 7ویں بین الاقوامی کانفرنس اور
ایپلی کیشنز (RiTA)، pp. 254-257. https://doi.org/10.1109/RITAPP.2019.8932853۔
نیرور، ایس پی، رشید، اے اے، نٹراجن، وی.، 2008۔ اسٹریٹجک مینجمنٹ فیلڈ کا دانشورانہ ڈھانچہ: ایک مصنف کے ساتھ حوالہ تجزیہ۔ حکمت عملی۔ منیج۔ J. 29 (3)،
319 336.
Neupane, K., Baysal-Gurel, F., 2021. بغیر پائلٹ کے فضائی گاڑیوں کا استعمال کرتے ہوئے پودوں کی بیماریوں کی خودکار شناخت اور نگرانی: ایک جائزہ۔ ریموٹ سینسنگ 13 (19)، 3841۔ https://doi.org/10.3390/rs13193841۔
Nex, F., Remondino, F., 2014. UAV for 3D میپنگ ایپلی کیشنز: ایک جائزہ۔ اپل جیومیٹکس 6 (1)، 1–15۔ https://doi.org/10.1007/s12518-013-0120-x۔
Niu, H., Hollenbeck, D., Zhao, T., Wang, D., Chen, Y., 2020. Evapotranspiration تخمینہ چھوٹے UAVs کے ساتھ درست زراعت میں۔ سینسر 20 (22)، 6427۔ https://
doi.org/10.3390/s20226427۔
Osareh, F., 1996. Bibliometrics, Citation Analysis and Co-Citation Analysis. ادب کا ایک جائزہ I 46 (3)، 149–158۔ https://doi.org/10.1515/libr.1996.46.3.149۔
P´adua, L., Vanko, J., Hruˇska, J., Ad˜ao, T., Sousa, JJ, Peres, E., Morais, R., 2017. UAS, sensors, and data processing in Agroforestry: عملی ایپلی کیشنز کا جائزہ۔ انٹر J. Remote Sens. 38 (8–10)، 2349–2391۔ https://doi.org/10.1080/01431161.2017.1297548۔
پانڈے، یو ایس، پرتیہسٹ، اے کے، آریال، جے.، کیاستھا، آر بی، 2020۔ اناج کی فصلوں کے لیے ڈرون پر مبنی ڈیٹا حل پر ایک جائزہ۔ ڈرون 4 (3)، 1-29۔ https://doi.org/10.3390/
ڈرون 4030041۔
پارسائین، ایم.، شہابی، ایم.، حسن پور، ایچ.، 2020۔ امیج پروسیسنگ اور مصنوعی اعصابی نیٹ ورک کا استعمال کرتے ہوئے تل کے بیجوں کے تیل اور پروٹین کے مواد کا تخمینہ لگانا۔ جے ایم تیل
کیمسٹ سوسائٹی 97 (7)، 691–702۔
Pena, ˜ JM, Torres-S´anchez, J., de Castro, AI, Kelly, M., Lopez-Granados, ´F., Suarez, O., آبجیکٹ پر مبنی تجزیہ کا استعمال کرتے ہوئے ابتدائی موسم مکئی کے کھیتوں میں گھاس کی نقشہ سازی کی
بغیر پائلٹ کے فضائی گاڑی (UAV) تصاویر۔ PLOS ONE 8 (10), e77151۔
P´erez-Ortiz, M., Pena, ˜ JM, Guti´errez, PA, Torres-S´ anchez, J., Herv' as-Martínez, C.,
Lopez-Granados, ´ F., 2015. سورج مکھی کی فصلوں میں بغیر پائلٹ کے فضائی گاڑیوں اور فصلوں کی قطار کا پتہ لگانے کا طریقہ استعمال کرتے ہوئے گھاس کی نقشہ سازی کے لیے ایک نیم زیر نگرانی نظام۔ اپل سافٹ کمپیوٹ۔ J. 37، 533-544. https://doi.org/10.1016/j.asoc.2015.08.027۔
Pincheira, M., Vecchio, M., Giaffreda, R., Kanhere, SS, 2021. درست زراعت میں بلاکچین پر مبنی پانی کے انتظام کے نظام کے لیے قابل اعتماد ڈیٹا ذرائع کے طور پر لاگت سے موثر IoT آلات۔ کمپیوٹنگ الیکٹران۔ زرعی۔ 180، 105889۔
Popescu, D., Stoican, F., Stamatescu, G., Ichim, L., Dragana, C., 2020. درست زراعت میں ذہین نگرانی کے لیے جدید UAV–WSN نظام۔ سینسر 20 (3), https://doi.org/10.3390/s20030817۔
پورنیڈر، ایم، شی، وائی، سیورنگ، ایس، کوہ، ایس ایل، 2020۔ سپلائی چین، ٹرانسپورٹ اور لاجسٹکس میں بلاک چین ایپلی کیشنز: لٹریچر کا ایک منظم جائزہ۔ انٹر J. Prod Res. 58 (7)، 2063–2081۔
Primicerio, J., Di Gennaro, SF, Fiorillo, E., Genesio, L., Lugato, E., Matese, A., Vaccari, FP, 2012. صحت سے متعلق زراعت کے لیے ایک لچکدار بغیر پائلٹ کے فضائی گاڑی۔
عین مطابق زرعی۔ 13 (4)، 517–523۔ https://doi.org/10.1007/s11119-012-9257-6۔
پرچرڈ، اے، 1969۔ شماریاتی کتابیات یا کتابیات۔ J. دستاویز۔ 25 (4)، 348–349۔
Pudelko, R., Stuczynski, T., Borzecka-Walker, M., 2012. تجرباتی کھیتوں اور فصلوں کی تشخیص کے لیے بغیر پائلٹ کے فضائی گاڑی (UAV) کی مناسبیت۔ زراعت 99 (4)، 431–436۔
پوری، وی، نیئر، اے، راجہ، ایل، 2017۔ ایگریکلچر ڈرون: درست زراعت میں ایک جدید پیش رفت۔ جے سٹیٹس۔ منیج۔ سسٹم 20 (4)، 507–518۔
Radoglou-Grammatikis, P., Sarigiannidis, P., Lagkas, T., Moscholios, I., 2020. صحت سے متعلق زراعت کے لیے UAV ایپلی کیشنز کی ایک تالیف۔ کمپیوٹنگ نیٹو۔ 172،
107148 https://doi.org/10.1016/j.comnet.2020.107148۔
رمیش، کے وی، راکیش، وی، پرکاسا راؤ، ای وی ایس، 2020۔ زرعی تحقیق میں بڑے ڈیٹا اینالیٹکس اور مصنوعی ذہانت کا اطلاق۔ انڈین جے ایگرون۔ 65 (4)، 383–395۔
Raparelli, E., Bajocco, S., 2019. زرعی اور جنگلات کے مطالعے میں بغیر پائلٹ کے فضائی گاڑیوں کے استعمال پر ایک کتابیات کا تجزیہ۔ انٹر J. Remote Sens. 40 (24)،
9070-9083۔ https://doi.org/10.1080/01431161.2019.1569793۔
راسموسن، جے، نیلسن، جے، گارسیا-رویز، ایف، کرسٹینسن، ایس، اسٹریبیگ، جے سی، لوٹز، بی، 2013۔
گھاس کی تحقیق میں چھوٹے بغیر پائلٹ ہوائی جہاز کے نظام (UAS) کے ممکنہ استعمال۔ ویڈ ریس 53 (4)، 242–248۔
Rasmussen, J., Ntakos, G., Nielsen, J., Svensgaard, J., Poulsen, RN, Christensen, S., کیا پودوں کے اشاریہ جات صارفین کے درجے کے کیمروں سے حاصل کیے گئے ہیں
UAVs تجرباتی پلاٹوں کا اندازہ لگانے کے لیے کافی قابل اعتماد ہیں؟ یور جے ایگرون۔ 74، 75–92۔ https://doi.org/10.1016/j.eja.2015.11.026۔
Rejeb, A., Rejeb, K., Abdollahi, A., Zailani, S., Iranmanesh, M., Ghobakhloo, M., 2022. خوراک کی فراہمی کی زنجیروں میں ڈیجیٹلائزیشن: ایک کتابیات کا جائزہ اور کلیدی راستے کا مرکزی راستہ
تجزیہ پائیداری 14 (1)، 83۔ https://doi.org/10.3390/su14010083۔
Rejeb, A., Rejeb, K., Simske, SJ, Treiblmaier, H., 2021a. سپلائی چین مینجمنٹ اور لاجسٹکس کے لیے ڈرونز: ایک جائزہ اور تحقیقی ایجنڈا۔ انٹر جے لاجسٹ۔ Res. اپل
1-24۔ https://doi.org/10.1080/13675567.2021.1981273۔
Rejeb, A., Rejeb, K., Simske, S., Treiblmaier, H., 2021b. لاجسٹکس اور سپلائی چین مینجمنٹ میں بلاکچین ٹیکنالوجیز: ایک ببلیو میٹرک جائزہ۔ لاجسٹکس 5 (4)، 72۔
https://doi.org/10.3390/logistics5040072.
Rejeb, A., Rejeb, K., Simske, S., Treiblmaier, H., 2021c. انسانی ہمدردی کے ڈرون: ایک جائزہ اور تحقیقی ایجنڈا۔ چیزوں کا انٹرنیٹ 16، 100434۔ https://doi.org/10.1016/j۔
iot.2021.100434.
Rejeb, A., Treiblmaier, H., Rejeb, K., Zailani, S., 2021d. صحت کی دیکھ بھال میں بلاکچین تحقیق: ایک بائبلومیٹرک جائزہ اور موجودہ تحقیقی رجحانات۔ ڈیٹا کے J.، Inf. اور
منیج۔ 3 (2)، 109-124۔
Rejeb, A., Simske, S., Rejeb, K., Treiblmaier, H., Zailani, S., 2020. انٹرنیٹ آف تھنگز ریسرچ ان سپلائی چین مینجمنٹ اینڈ لاجسٹکس: ایک کتابیات کا تجزیہ۔ انٹرنیٹ
چیزوں کا 12، 100318۔
رپورٹ لنکر، 2021۔ گلوبل ایگریکلچر ڈرونز مارکیٹ سال گلوب نیوز وائر نیوز روم تک US$15.2 بلین تک پہنچ جائے گی۔ https://www.globenewswire.com/news-release/2021/08/10/2277986/0/en/Global-Agriculture-Drones-Market-to-Reach-US-15-2-Billion-by-the- سال-2027.html۔
Ribeiro-Gomes, K., Hernandez-L ´opez, ´ D., Ortega, JF, Ballesteros, R., Poblete, T., Moreno, MA, 2017. غیر ٹھنڈا تھرمل کیمرہ کیلیبریشن اور اس کی اصلاح
زراعت میں UAV ایپلی کیشنز کے لیے فوٹوگرامیٹری کا عمل۔ سینسر (سوئٹزرلینڈ) 17 (10)۔ https://doi.org/10.3390/s17102173۔
رویرا، ایم اے، پیزم، اے، 2015۔ مہمان نوازی کی تحقیق میں پیشرفت: "روڈنی ڈینجر فیلڈ سے اریتھا فرینکلن تک"۔ انٹر جے ہم عصر۔ ہسپتال منیج۔ 27 (3)
362–378. https://doi.org/10.1108/IJCHM-03-2014-0146.
Roldan, ´JJ, Joossen, G., Sanz, D., Del Cerro, J., Barrientos, A., 2015. گرین ہاؤسز میں ماحولیاتی تغیرات کی پیمائش کے لیے Mini-UAV پر مبنی حسی نظام۔ سینسر 15 (2), 3334–3350۔ https://doi.org/10.3390/s150203334۔
Rozenberg, G., Kent, R., Blank, L., 2021. پیاز کے کمرشل کھیتوں میں موسم کے آخر میں گھاس کی مقامی تقسیم کے نمونوں کا پتہ لگانے اور تجزیہ کرنے کے لیے استعمال کیا جاتا صارف گریڈ UAV۔ عین مطابق زرعی۔ 22 (4)، 1317–1332۔ https://doi.org/10.1007/s11119-021-09786-y۔
Saari, H., Pellikka, I., Pesonen, L., Tuominen, S., Heikkila, ¨ J., Holmlund, C., Makynen, ¨ J., Ojala, K., Antila, T., 2011. بغیر پائلٹ فضائی گاڑی (UAV) جنگل اور زراعت کی ایپلی کیشنز کے لیے سپیکٹرل کیمرہ سسٹم سے چلتی ہے۔ آگے بڑھو. SPIE - انٹ۔ Soc آپٹ انج. 8174 https://doi.org/10.1117/12.897585۔
ساہ، بی، گپتا، آر، بنی ہانی، ڈی، 2021۔ ڈرون لاجسٹکس کو لاگو کرنے میں رکاوٹوں کا تجزیہ۔ انٹر جے لاجسٹ۔ Res. اپل 24 (6)، 531–550۔ https://doi.org/10.1080/
13675567.2020.1782862.
ساہا، اے کے، ساہا، جے، رے، آر، سرکار، ایس، دتہ، ایس، چٹوپادھیائے، ایس پی، اور ساہا، ایچ این، آئی او ٹی پر مبنی ڈرون زرعی میدان میں فصل کے معیار کو بہتر بنانے کے لیے۔ ایس ایچ میں
N. چکربرتی S. (Ed.)، 2018 IEEE 8ویں سالانہ کمپیوٹنگ اینڈ کمیونیکیشن ورکشاپ اور کانفرنس، CCWC 2018 (جلد 2018-جنوری، pp. 612–615)۔ انسٹی ٹیوٹ
آف الیکٹریکل اینڈ الیکٹرانکس انجینئرز انکارپوریشن doi: 10.1109/CCWC.2018.8301662۔
سائی ونیت، کے وی، ورا پرساد، وائی آر، دوبے، ایس آر، وینکٹارامن، ایچ، 2019۔ ایل ای ڈی کام: درست زراعت کے لیے ایک ناول اور موثر ایل ای ڈی پر مبنی مواصلات۔ IEEE Conf. معلومات کمیون ٹیکنالوجی. 2019، 1-5۔ https://doi.org/10.1109/CICT48419.2019.9066177۔
Salamí, E., Barrado, C., Pastor, E., 2014. UAV پرواز کے تجربات پودوں والے علاقوں کی ریموٹ سینسنگ پر لاگو ہوتے ہیں۔ ریموٹ سینسنگ 6 (11)، 11051–11081۔ https://doi.org/10.3390/rs61111051۔
Sankaran, S., Khot, LR, Espinoza, CZ, Jarolmasjed, S., Sathuvalli, VR, Vandemark, GJ, Miklas, PN, Carter, AH, Pumphrey, MO, Knowles, NRN, Pavek, MJ, 2015۔
قطار اور فیلڈ کراپ فینوٹائپنگ کے لیے کم اونچائی، ہائی ریزولوشن ایریل امیجنگ سسٹم: ایک جائزہ۔ یور جے ایگرون۔ 70، 112–123۔ https://doi.org/10.1016/j
eja.2015.07.004.
Santesteban, LG, Di Gennaro, SF, Herrero-Langreo, A., Miranda, C., Royo, JB, Matese, A., 2017. ہائی ریزولوشن UAV پر مبنی تھرمل امیجنگ
انگور کے باغ میں پودوں کے پانی کی حالت کی فوری اور موسمی تغیر۔ زرعی۔ پانی کا انتظام۔ 183، 49-59۔ https://doi.org/10.1016/j.agwat.2016.08.026۔
Sarli, CC, Dubinsky, EK, Holmes, KL, 2010. اقتباس کے تجزیہ سے آگے: تحقیقی اثرات کی تشخیص کے لیے ایک ماڈل۔ جے میڈ لائبریری ایسوسی ایشن : جے ایم ایل اے 98 (1)، 17-23۔ https://doi.org/10.3163/1536-5050.98.1.008۔
Schaepman, ME, Ustin, SL, Plaza, AJ, Painter, TH, Verrelst, J., Liang, S., 2009. ارتھ سسٹم سائنس سے متعلق امیجنگ سپیکٹروسکوپی — ایک تشخیص۔ ریموٹ سینس۔ ماحول۔ 113، S123–S137۔
Schirrmann, M., Giebel, A., Gleiniger, F., Pflanz, M., Lentschke, J., Dammer, K.-H., 2016. کم لاگت UAV کے ساتھ موسم سرما کی گندم کی فصلوں کے زرعی پیرامیٹرز کی نگرانی
تصویر ریموٹ سینسنگ 8 (9)۔ https://doi.org/10.3390/rs8090706۔
Schmale III, DG, Dingus, BR, Reinholtz, C., 2008. اوپر درست ایرو بائیولوجیکل نمونے لینے کے لیے خود مختار بغیر پائلٹ کے فضائی گاڑی کی ترقی اور اطلاق
زرعی میدان J. فیلڈ روب 25 (3)، 133–147۔ https://doi.org/10.1002/rob.20232۔
Shadrin, D., Menshchikov, A., Somov, A., Bornemann, G., Hauslage, J., Fedorov, M.,
مصنوعی ذہانت کے ساتھ ایمبیڈڈ سینسنگ کے ذریعے درست زراعت کو فعال کرنا۔ آئی ای ای ای ٹرانس۔ ساز۔ میس 69 (7)، 4103–4113۔
شقطرح، ح.، سوالمہ، ہجری، الفقہاء، الف، دو، ز، المائطہ، ای.، خلیل، اول،
Othman, NS, Khreishah, A., Guizani, M., 2019. بغیر پائلٹ کے فضائی گاڑیاں (UAVs): سول ایپلی کیشنز اور اہم تحقیقی چیلنجز پر ایک سروے۔ IEEE رسائی 7،
48572–48634۔ https://doi.org/10.1109/ACCESS.2019.2909530۔
شکور، این.، نارتھروپ، ڈی، مرے، ایس، موکلر، ٹی سی، 2019۔ بگ ڈیٹا سے چلنے والی زراعت: پودوں کی افزائش، جینومکس، اور ریموٹ سینسنگ کے استعمال میں بڑے ڈیٹا کے تجزیات
فصل کی پیداواری صلاحیت کو بڑھانے کے لیے ٹیکنالوجیز۔ پلانٹ فینوم J. 2 (1), 1-8۔
شرما، بی کے، چندر، جی، مشرا، وی پی، 2019۔ فارنزک تحقیقات میں UAV اور AI کا تقابلی تجزیہ اور مضمرات۔ میں: پروسیڈنگز - 2019 ایمیٹی انٹرنیشنل
مصنوعی ذہانت پر کانفرنس۔ https://doi.org/10.1109/AICAI.2019.8701407۔
شرما، آر، ششودیا، اے، گنا سیکرن، اے، من، ایچ، منیم، زیڈ ایچ، 2022۔ سپلائی چین مینجمنٹ میں مصنوعی ذہانت کا کردار: علاقے کی نقشہ سازی۔ انٹر جے۔
پیداوار Res. 1–24۔ https://doi.org/10.1080/00207543.2022.2029611۔
Shi, Y., Thomasson, JA, Murray, SC, Pugh, NA, Rooney, WL, Shafian, S., Rajan, N., Rouze, G., Morgan, CLS, Neely, HL, Rana, A., Bagavathiannan ، ایم وی،
Henrickson, J., Bowden, E., Valasek, J., Olsenholler, J., Bishop, MP, Sheridan, R., Putman, EB, Popescu, S., Burks, T., Cope, D., Ibrahim A.، McCutchen، BF،
Baltensperger, DD, Avant, RV, Vidrine, M., Yang, C., Zhang, J., 2016. بغیر پائلٹ کے فضائی گاڑیاں برائے ہائی تھرو پٹ فینوٹائپنگ اور زرعی تحقیق۔ پلس ون
11 (7)، e0159781۔
Shuai, G., Martinez-Feria, RA, Zhang, J., Li, S., Price, R., Basso, B., 2019. بغیر پائلٹ کے ہوائی جہاز کا استعمال کرتے ہوئے پیداوار کے استحکام والے علاقوں میں مکئی کے اسٹینڈ ہیٹروجنیٹی کو پکڑنا
گاڑیاں (UAV)۔ سینسر 19 (20), 4446۔ https://doi.org/10.3390/s19204446۔
سمال، ایچ.، 1973۔ سائنسی ادب میں شریک حوالہ: دو دستاویزات کے درمیان تعلق کا ایک نیا پیمانہ۔ جے ایم Soc معلومات سائنس 24 (4)، 265–269۔
Small, H., Rorvig, ME, Lunin, LF, 1999. اقتباس کی نقشہ سازی کے ذریعے سائنس کو تصور کرنا۔ جے ایم Soc معلومات سائنس 50 (9)، 799–813۔
Soares, VHA, Ponti, MA, Gonçalves, RA, Campello, RJGB, 2021۔ بڑے چراگاہ والے علاقوں میں جغرافیائی جگہ والی فضائی تصاویر کے ساتھ مویشیوں کی گنتی۔ کمپیوٹنگ الیکٹران۔ زرعی۔ 189، 106354 https://doi.org/10.1016/j.compag.2021.106354۔
سریواستو، کے، پانڈے، پی سی، شرما، جے کے، 2020۔ UAVs کا استعمال کرتے ہوئے صحت سے متعلق زراعت کی ایپلی کیشنز میں روٹ آپٹیمائزیشن کے لیے ایک نقطہ نظر۔ ڈرونز 4 (3)، 58۔ https://doi.org/ 10.3390/drones4030058۔
اسٹافورڈ، جے وی، 2000۔ 21ویں صدی میں درست زراعت کا نفاذ۔ جے ایگرک انج. Res. 76 (3)، 267–275۔
Su, J., Coombes, M., Liu, C., Guo, L., Chen, W.-H., 2018. بغیر پائلٹ کے فضائی گاڑی کا استعمال کرتے ہوئے ریموٹ سینسنگ امیجری کے ذریعے گندم کی خشک سالی کا اندازہ۔ 2018 میں 37ویں چینی کنٹرول کانفرنس (CCC)۔
Su, J., Liu, C., Coombes, M., Hu, X., Wang, C., Xu, X., Li, Q., Guo, L., Chen, W.-H., 2018۔ ملٹی اسپیکٹرل UAV فضائی منظر کشی سے سیکھ کر گندم کے پیلے زنگ کی نگرانی۔
کمپیوٹنگ الیکٹران۔ زرعی۔ 155، 157–166۔ https://doi.org/10.1016/j compag.2018.10.017.
Su, Y., Wang, X., 2021. بگ ڈیٹا کے ذریعے سمارٹ ایگریکلچر کی تعمیر کے عمل میں زرعی اقتصادی انتظام کی اختراع۔ پائیدار کمپیوٹر۔ Inf. سسٹم 31، 100579 https://doi.org/10.1016/j.suscom.2021.100579۔
سلیوان، ڈی جی، فلٹن، جے پی، شا، جے این، بلینڈ، جی ایل، 2007۔ کپاس کی چھتری میں پانی کے تناؤ کا پتہ لگانے کے لیے بغیر پائلٹ کے تھرمل انفراریڈ فضائی نظام کی حساسیت کا اندازہ لگانا۔ ٹرانس ASABE 50 (6)، 1955–1962۔
Sumesh, KC, Ninsawat, S., Som-ard, J., 2021. بغیر پائلٹ کے فضائی گاڑی کا استعمال کرتے ہوئے گنے کی پیداوار کے تخمینے کے لیے RGB پر مبنی نباتاتی اشاریہ، فصل کی سطح کا ماڈل اور آبجیکٹ پر مبنی تصویری تجزیہ کا طریقہ۔ کمپیوٹنگ الیکٹران۔ زرعی۔ 180، 105903 https://doi.org/10.1016/j.compag.2020.105903۔
Suomalainen, J., Anders, N., Iqbal, S., Franke, J., Wenting, P., Bartholomeus, H., Becker, R., Kooistra, L., 2013. ایک ہلکے وزن کا ہائپر اسپیکٹرل میپنگ سسٹم
بغیر پائلٹ کی فضائی گاڑیاں - پہلے نتائج۔ میں: 2013 ہائپر اسپیکٹرل امیج اور سگنل پروسیسنگ پر 5ویں ورکشاپ: ریموٹ سینسنگ میں ارتقاء (WHISPERS)، صفحہ 1-4۔ https://doi.org/10.1109/WHISPERS.2013.8080721۔
Suomalainen, J., Anders, N., Iqbal, S., Roerink, G., Franke, J., Wenting, P., Hünniger, D., Bartholomeus, H., Becker, R., Kooistra, L., 2014. ایک ہلکا پھلکا ہائپر اسپیکٹرل
بغیر پائلٹ کے فضائی گاڑیوں کے لیے نقشہ سازی کا نظام اور فوٹو گرام میٹرک پروسیسنگ چین۔ ریموٹ سینسنگ 6 (11)، 11013–11030۔ https://doi.org/10.3390/
آر ایس 61111013۔
سیدہ، آئی ایچ، عالم، ایم ایم، الٰہی، یو.، سعود، ایم ایم، 2021۔ زراعت میں امیج پروسیسنگ، UAV اور AI کا استعمال کرتے ہوئے ایڈوانس کنٹرول کی حکمت عملی: ایک جائزہ۔ ورلڈ J. Eng. 18 (4)
579–589. https://doi.org/10.1108/WJE-09-2020-0459.
تہائی، اے.، رِگسبی، جے ٹی، 1998۔ اکاؤنٹنگ میں جرنل کے اثر و رسوخ کی تحقیقات کے لیے حوالہ جات کا استعمال کرتے ہوئے انفارمیشن پروسیسنگ۔ Inf. عمل انتظام کریں۔ 34 (2–3)، 341–359۔
Tang, Y., Dananjayan, S., Hou, C., Guo, Q., Luo, S., He, Y., 2021. 5G نیٹ ورک پر ایک سروے اور زراعت پر اس کے اثرات: چیلنجز اور مواقع۔ کمپیوٹنگ
الیکٹران۔ زرعی۔ 180، 105895 https://doi.org/10.1016/j.compag.2020.105895۔
Tantalaki, N., Souravlas, S., Roumeliotis, M., 2019. درست زراعت میں ڈیٹا پر مبنی فیصلہ سازی: زرعی نظاموں میں بڑے ڈیٹا کا اضافہ۔ جے ایگرک کھانے کی معلومات۔
20 (4) ، 344–380۔
Tao, H., Feng, H., Xu, L., Miao, M., Yang, G., Yang, X., Fan, L., 2020. UAV کا استعمال کرتے ہوئے موسم سرما کی گندم کی پیداوار اور پودے کی اونچائی کا تخمینہ ہائپر اسپیکٹرل تصاویر پر مبنی۔
سینسر 20 (4)، 1231۔
Techy, L., Schmale III, DG, Woolsey, CA, 2010. دو خودمختار بغیر پائلٹ ہوائی گاڑیوں کا استعمال کرتے ہوئے نچلے ماحول میں پودوں کے پیتھوجین کی مربوط ایروبائیولوجیکل سیمپلنگ۔ J. فیلڈ روب 27 (3)، 335–343۔ https://doi.org/10.1002/rob.20335۔
Tetila, EC, Machado, BB, Astolfi, G., Belete, NAdS, Amorim, WP, Roel, AR, Pistori, H., 2020. گہری سیکھنے کا استعمال کرتے ہوئے سویا بین کیڑوں کی کھوج اور درجہ بندی
UAV تصاویر کے ساتھ۔ کمپیوٹنگ الیکٹران۔ زرعی۔ 179، 105836۔
Thamm, H.-P., Menz, G., Becker, M., Kuria, DN, Misana, S., Kohn, D., 2013. تنزانیہ میں AN Wetland میں زرعی نظام کا اندازہ لگانے کے لیے Uas کا استعمال۔ اور WetSeason for Sustainable Agriculture and Providing Ground Truth for Terra-Sar X Data۔ میں: ISPRS - فوٹوگرامیٹری کے بین الاقوامی آرکائیوز، ریموٹ سینسنگ اور اسپیشل انفارمیشن سائنسز، پی پی 401–406۔ https://doi.org/10.5194/isprsarchivesXL-1-W2-401-2013۔
تھیل وال، ایم، 2008۔ ببلیو میٹرکس ٹو ویبومیٹرکس۔ J. معلومات سائنس 34 (4)، 605–621۔
Torres-Sanchez, ´J., Lopez-Granados, ´ F., Pena, ˜ JM, 2015. UAV امیجز میں زیادہ سے زیادہ حد بندی کے لیے ایک خودکار آبجیکٹ پر مبنی طریقہ: جڑی بوٹیوں والی فصلوں میں پودوں کی کھوج کے لیے درخواست۔ کمپیوٹنگ الیکٹران۔ زرعی۔ 114، 43–52۔ https://doi.org/10.1016/j.compag.2015.03.019۔
Torres-Sanchez, ´ J., Lopez-Granados, ´ F., Serrano, N., Arquero, O., Pena, ˜ JM, Hassan, QK, 2015. اعلی تھرو پٹ 3-D نگرانی کے ساتھ زرعی درختوں کے باغات بغیر پائلٹ ایریل وہیکل (UAV) ٹیکنالوجی۔ PLOS ONE 10 (6) e0130479۔
Torres-Sanchez, ´ J., Pena, ˜ JM, de Castro, AI, Lopez-Granados, ´ F., 2014. UAV سے تصاویر کا استعمال کرتے ہوئے ابتدائی موسم کے گندم کے کھیتوں میں پودوں کے حصے کی کثیر وقتی نقشہ سازی۔ کمپیوٹنگ الیکٹران۔ زرعی۔ 103، 104-113۔ https://doi.org/10.1016/j compag.2014.02.009.
Tsouros, DC, Bibi, S., Sarigiannidis, PG, 2019. درست زراعت کے لیے UAV پر مبنی ایپلی کیشنز کا جائزہ۔ معلومات (سوئٹزرلینڈ) 10 (11)۔ https://doi.org/10.3390/info10110349۔
Tu, Y.-H., Phinn, S., Johansen, K., Robson, A., Wu, D., 2020۔ باغبانی کے درختوں کی فصل کی ساخت کی پیمائش کے لیے ڈرون پرواز کی منصوبہ بندی کو بہتر بنانا۔ آئی ایس پی آر ایس جے فوٹوگرام۔
ریموٹ سینس 160، 83-96۔ https://doi.org/10.1016/j.isprsjprs.2019.12.006
Tzounis, A., Katsoulas, N., Bartzanas, T., Kittas, C., 2017. زراعت میں چیزوں کا انٹرنیٹ، حالیہ پیشرفت اور مستقبل کے چیلنجز۔ بایو سسٹم۔ انج. 164، 31–48۔
https://doi.org/10.1016/j.biosystemseng.2017.09.007.
Uddin, A., Singh, VK, Pinto, D., Olmos, I., 2015. میکسیکو میں کمپیوٹر سائنس ریسرچ کی سائنو میٹرک میپنگ۔ سائینٹومیٹرکس 105 (1)، 97–114۔
UN.، 2019. عالمی آبادی کے امکانات 2019. https://population.un.org/wpp/ (15/04/2022 کو رسائی)۔
Uto, K., Seki, H., Saito, G., Kosugi, Y., 2013. UAV ماونٹڈ چھوٹے ہائپر اسپیکٹرل سینسر سسٹم کے ذریعے چاول کے پیڈیز کی خصوصیات۔ IEEE J. Sel. اوپر۔ اپل ارتھ اوبس۔
ریموٹ سینس 6 (2)، 851–860۔ https://doi.org/10.1109/JSTARS.2013.2250921۔ van der Merwe, D., Burchfield, DR, Witt, TD, Price, KP, Sharda, A., 2020. Drones in
زراعت Adv. ایگرون۔ 162، 1–30۔
ویلسامی، پی.، راجندرن، ایس.، مہندرن، آر کے، نصیر، ایس، شفیق، ایم، چوئی، جے-جی، 2022۔
صحت سے متعلق زراعت میں بغیر پائلٹ کے فضائی گاڑیاں (UAV): ایپلی کیشنز اور چیلنجز۔ توانائیاں 15 (1)، 217۔ https://doi.org/10.3390/en15010217۔
Ventura, D., Bonifazi, A., Gravina, MF, Belluscio, A., Ardizzone, G., 2018. بغیر پائلٹ کے فضائی استعمال کرتے ہوئے ماحولیاتی طور پر حساس سمندری رہائش گاہوں کی نقشہ سازی اور درجہ بندی
گاڑی (UAV) کی تصویر اور آبجیکٹ پر مبنی تصویری تجزیہ (OBIA)۔ ریموٹ سینسنگ 10 (9)، 1331۔ https://doi.org/10.3390/rs10091331۔
Verger, A., Vigneau, N., Ch´eron, C., Gilliot, J.-M., Comar, A., Baret, F., 2014. گندم اور ریپسیڈ فصلوں پر بغیر پائلٹ کے فضائی نظام سے گرین ایریا انڈیکس . ریموٹ سینس۔ ماحول۔ 152، 654–664۔ https://doi.org/10.1016/j.rse.2014.06.006۔
Von Bueren, SK, Burkart, A., Hueni, A., Rascher, U., Tuohy, MP, Yule, IJ, 2015. گھاس کے میدان پر چار آپٹیکل UAV پر مبنی سینسر کی تعیناتی: چیلنجز اور
حدود حیاتیاتی سائنسز 12 (1)، 163–175۔ https://doi.org/10.5194/bg-12-163-2015۔
Vuran, MC, Salam, A., Wong, R., Irmak, S., 2018. صحت سے متعلق زراعت میں زیر زمین چیزوں کا انٹرنیٹ: فن تعمیر اور ٹیکنالوجی کے پہلو۔ ایڈہاک نیٹ ورک۔ 81،
160-173۔ https://doi.org/10.1016/j.adhoc.2018.07.017۔
Wamba, SF, Queiroz, MM, 2021۔ ڈیجیٹل صحت کے لیے ایک خفیہ جزو کے طور پر ذمہ دار مصنوعی ذہانت: کتابیات کا تجزیہ، بصیرتیں، اور تحقیقی ہدایات۔
معلومات سسٹم سامنے والا۔ 1-16۔
Wang, L., Zhang, G., Wang, Z., Liu, J., Shang, J., Liang, L., 2019. فصل کی نمو کی نگرانی میں ریموٹ سینسنگ تحقیقی رجحان کا ببلیو میٹرک تجزیہ: چین میں ایک کیس اسٹڈی۔ ریموٹ سینسنگ 11 (7)۔ https://doi.org/10.3390/rs11070809۔
وائٹ، ایچ ڈی، گریفتھ، بی سی، 1981۔ مصنف کا حوالہ: دانشورانہ ساخت کا ایک ادبی پیمانہ۔ جے ایم Soc معلومات سائنس 32 (3)، 163–171۔
Xiang, H., Tian, L., 2011. ایک خود مختار بغیر پائلٹ ہوائی گاڑی (UAV) پر مبنی کم لاگت والے زرعی ریموٹ سینسنگ سسٹم کی ترقی۔ بایو سسٹم۔ انج. 108 (2)، 174-190۔ https://doi.org/10.1016/j.biosystemseng.2010.11.010۔
Xie, C., Yang, C., 2020. UAV بیسڈ سینسر کا استعمال کرتے ہوئے پلانٹ کے ہائی تھرو پٹ فینوٹائپنگ ٹریٹس پر ایک جائزہ۔ کمپیوٹنگ الیکٹران۔ زرعی۔ 178، 105731 https://doi.org/10.1016/j۔
compag.2020.105731.
Yao, H., Qin, R., Chen, X., 2019. ریموٹ سینسنگ ایپلی کیشنز کے لیے بغیر پائلٹ کے فضائی گاڑی — ایک جائزہ۔ ریموٹ سینسنگ 11 (12)۔ https://doi.org/10.3390/
آر ایس 11121443۔
ییوم، ایس.، 2021۔ ملٹی روٹر کے ذریعے انفراریڈ تھرمل امیجنگ کے ساتھ لوگوں سے باخبر رہنے اور غلط ٹریک کو ہٹانا۔ ڈرونز 5 (3), 65۔ https://doi.org/10.3390/drones5030065۔
Yue, J., Feng, H., Jin, X., Yuan, H., Li, Z., Zhou, C., Yang, G., Tian, Q., 2018. تصاویر کا استعمال کرتے ہوئے فصل کے پیرامیٹرز کے تخمینے کا موازنہ UAV ماونٹڈ سے
سنیپ شاٹ ہائپر اسپیکٹرل سینسر اور ہائی ڈیفینیشن ڈیجیٹل کیمرہ۔ ریموٹ سینسنگ 10 (7)، 1138۔ https://doi.org/10.3390/rs10071138۔
Yue, J., Yang, G., Li, C., Li, Z., Wang, Y., Feng, H., Xu, B., 2017. بغیر پائلٹ کے فضائی گاڑی کا استعمال کرتے ہوئے موسم سرما کی گندم کے اوپر زمین کے بایوماس کا تخمینہ- پر مبنی سنیپ شاٹ
ہائپر اسپیکٹرل سینسر اور فصل کی اونچائی بہتر ماڈل۔ ریموٹ سینسنگ 9 (7)۔ https://doi.org/10.3390/rs9070708۔
Zahawi, RA, Dandois, JP, Holl, KD, Nadwodny, D., Reid, JL, Ellis, EC, 2015. اشنکٹبندیی جنگل کی بحالی کی نگرانی کے لیے ہلکے وزن کے بغیر پائلٹ کے فضائی گاڑیوں کا استعمال۔ بائول
محفوظ کرنا۔ 186، 287–295۔ https://doi.org/10.1016/j.biocon.2015.03.031۔ Zamora-Izquierdo, MA, Santa, J., Martínez, JA, Martínez, V., Skarmeta, AF, 2019۔
کنارے اور کلاؤڈ کمپیوٹنگ پر مبنی اسمارٹ فارمنگ IoT پلیٹ فارم۔ بایو سسٹم۔ انج. 177،
4 17.
Zarco-Tejada, PJ, Diaz-Varela, R., Angileri, V., Loudjani, P., 2014. بغیر پائلٹ کے ہوائی جہاز سے حاصل کی گئی انتہائی اعلی ریزولیوشن امیجری کا استعمال کرتے ہوئے درخت کی اونچائی کی مقدار
گاڑی (UAV) اور خودکار 3D تصویر کی تعمیر نو کے طریقے۔ یور جے ایگرون۔ 55، 89-99۔ https://doi.org/10.1016/j.eja.2014.01.004۔
Zhang, C., Craine, WA, McGee, RJ, Vandemark, GJ, Davis, JB, Brown, J., Hulbert, SH, Sankaran, S., 2020۔ ٹھنڈے موسم کی فصلوں میں پھولوں کی شدت کی تصویر پر مبنی فینوٹائپنگ۔ سینسر 20 (5), 1450۔ https://doi.org/10.3390/s20051450۔
Zhang، C.، Kovacs، JM، 2012. صحت سے متعلق زراعت کے لیے چھوٹے بغیر پائلٹ کے فضائی نظام کا اطلاق: ایک جائزہ۔ عین مطابق زرعی۔ 13 (6)، 693–712۔ https://doi.org/
10.1007/s11119-012-9274-5.
Zhang, L., Zhang, H., Niu, Y., Han, W., 2019. UAV ملٹی اسپیکٹرل ریموٹ سینسنگ پر مبنی مکئی کے پانی کے تناؤ کی نقشہ سازی۔ ریموٹ سینسنگ 11 (6)، 605۔
Zhang, X., Han, L., Dong, Y., Shi, Y., Huang, W., Han, L., Gonz' alez-Moreno, P., Ma, H., Ye, H., Sobeih. , T., 2019. خودکار پیلے رنگ کے زنگ کے لیے گہری سیکھنے پر مبنی نقطہ نظر
ہائی ریزولوشن ہائپر اسپیکٹرل UAV امیجز سے بیماری کا پتہ لگانا۔ ریموٹ سینسنگ 11 (13)، 1554۔
Zhao, X., Zhang, J., Huang, Y., Tian, Y., Yuan, L., 2022. ویولیٹ تجزیہ کے ساتھ مل کر ہائپر اسپیکٹرل امیجنگ کا استعمال کرتے ہوئے چائے کے پودوں کی بیماری اور کیڑوں کے تناؤ کا پتہ لگانا اور امتیاز کرنا۔ کمپیوٹنگ الیکٹران۔ زرعی۔ 193، 106717 https://doi.org/10.1016/j۔ compag.2022.106717.
Zheng, A., Wang, M., Li, C., Tang, J., Luo, B., 2022. Entropy گائیڈڈ ایڈورسریئل ڈومین موافقت برائے فضائی امیج سیمینٹک سیگمنٹیشن۔ آئی ای ای ای ٹرانس۔ جی
Zheng, H., Cheng, T., Yao, X., Deng, X., Tian, Y., Cao, W., Zhu, Y., 2016. زمین پر مبنی سپیکٹرل کے ٹائم سیریز کے تجزیہ کے ذریعے چاول کی فینولوجی کا پتہ لگانا انڈیکس ڈیٹا. کھیت کی فصلیں Res. 198، 131–139۔ https://doi.org/10.1016/j.fcr.2016.08.027۔
Zheng, J., Yang, W., 2018. وائرلیس سینسرز کی بنیاد پر ایک درست زراعت کے رساو سیڈنگ سسٹم کا ڈیزائن۔ انٹر J. آن لائن انجینئر۔ 14 (05)، 184۔
Zhou, L., Gu, X., Cheng, S., Yang, G., Shu, M., Sun, Q., 2020. UAV-LiDAR ڈیٹا کا استعمال کرتے ہوئے درج شدہ مکئی کے پودوں کی اونچائی میں تبدیلی کا تجزیہ۔ زراعت 10 (5)، 146. https://
doi.org/10.3390/agriculture10050146۔
Zhou, S., Chai, X., Yang, Z., Wang, H., Yang, C., Sun, T., 2021. Maize-IAS: اعلی تھرو پٹ پلانٹ فینوٹائپنگ کے لیے گہری سیکھنے کا استعمال کرتے ہوئے مکئی کی تصویر کا تجزیہ کرنے والا سافٹ ویئر . پودوں کے طریقے 17 (1), 48. https://doi.org/10.1186/s13007-021-00747-0۔
Zhou, X., Zheng, HB, Xu, XQ, He, JY, Ge, XK, Yao, X., Cheng, T., Zhu, Y., Cao, WX, Tian, YC, 2017. میں اناج کی پیداوار کی پیشن گوئی کثیر وقتی پودوں کا استعمال کرتے ہوئے چاول
UAV پر مبنی ملٹی اسپیکٹرل اور ڈیجیٹل امیجری سے اشاریے۔ آئی ایس پی آر ایس جے فوٹوگرام۔ ریموٹ سینس 130، 246–255۔ https://doi.org/10.1016/j.isprsjprs.2017.05.003۔
Zhou, Y., Xie, Y., Shao, L., 2016. وائرلیس سینسر نیٹ ورک پر مبنی گرین ہاؤس مانیٹرنگ سسٹم کی بنیادی ٹیکنالوجی کی نقل۔ انٹر J. آن لائن انجینئر۔ 12 (05)
43.
Zhou, Z., Majeed, Y., Diverres Naranjo, G., Gambacorta, EMT, 2021. صحت سے متعلق زراعت میں انفراریڈ تھرمل امیجری کے ساتھ فصل کے پانی کے تناؤ کا اندازہ: ایک جائزہ
اور گہری سیکھنے کی ایپلی کیشنز کے مستقبل کے امکانات۔ کمپیوٹنگ الیکٹران۔ زرعی۔ 182، 106019 https://doi.org/10.1016/j.compag.2021.106019۔

{kind=link}